




官方已经推出ROS及ROS2功能包,
参见GitHub,
https://github.com/cyberbotics/webots_ros
https://github.com/cyberbotics/webots_ros2
本人使用的是 webots2020b 与 ros-foxy
首先安装 webots的ros2包
sudo apt-get install ros-foxy-webots-ros2
然后创建ros2工作空间,以及ros2 python包
mkdir webots_ros2_ws/src
ros2 pkg create car_con --build-type ament_python --dependencies rclpy
然后打开想要控制的模型
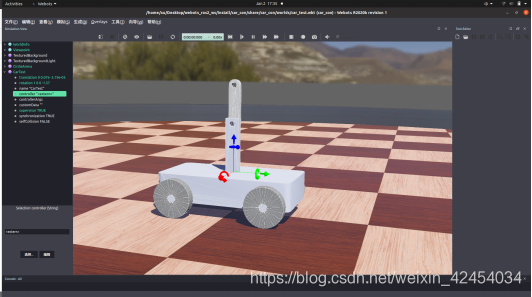
这里我使用了在soildworks中建立的模型
将solidworks装配体模型导入webots并进行控制
将面板中将模型的 controller选为 “< extern>”,并保存,否则之后会报找不到控制器的错误。
car_con为ros包,其结构如下:
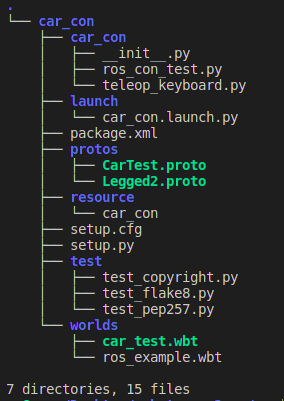
其中ros_con_test.py为控制代码
"""ROS2 example controller."""
# You may need to import some classes  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8225
8225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









