




欧洲航天局ESA的ROS2案例,源码在github上。
使用:ros2 launch rover_simulation simulation_control.launch.py
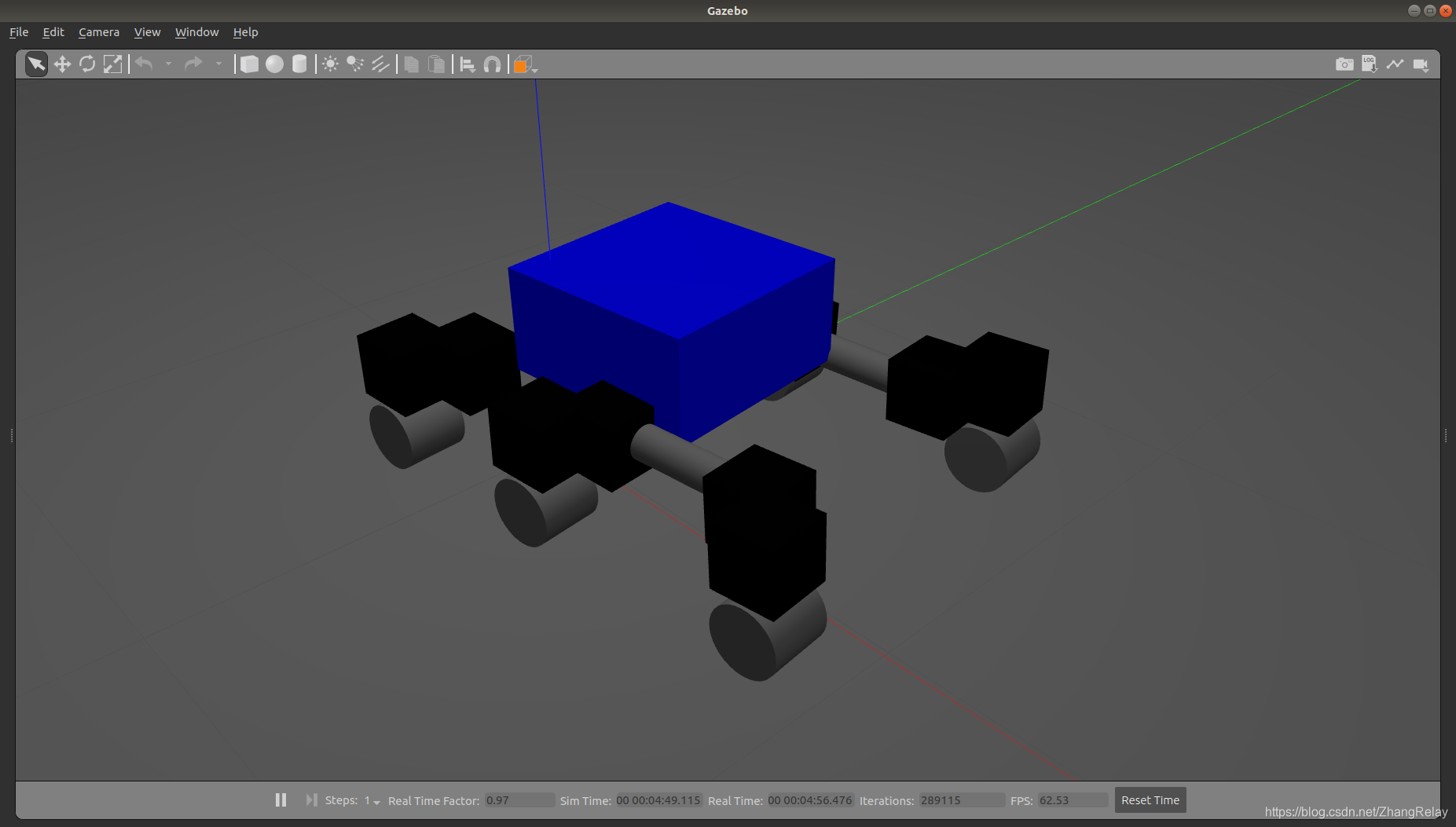
gazebo视角1:
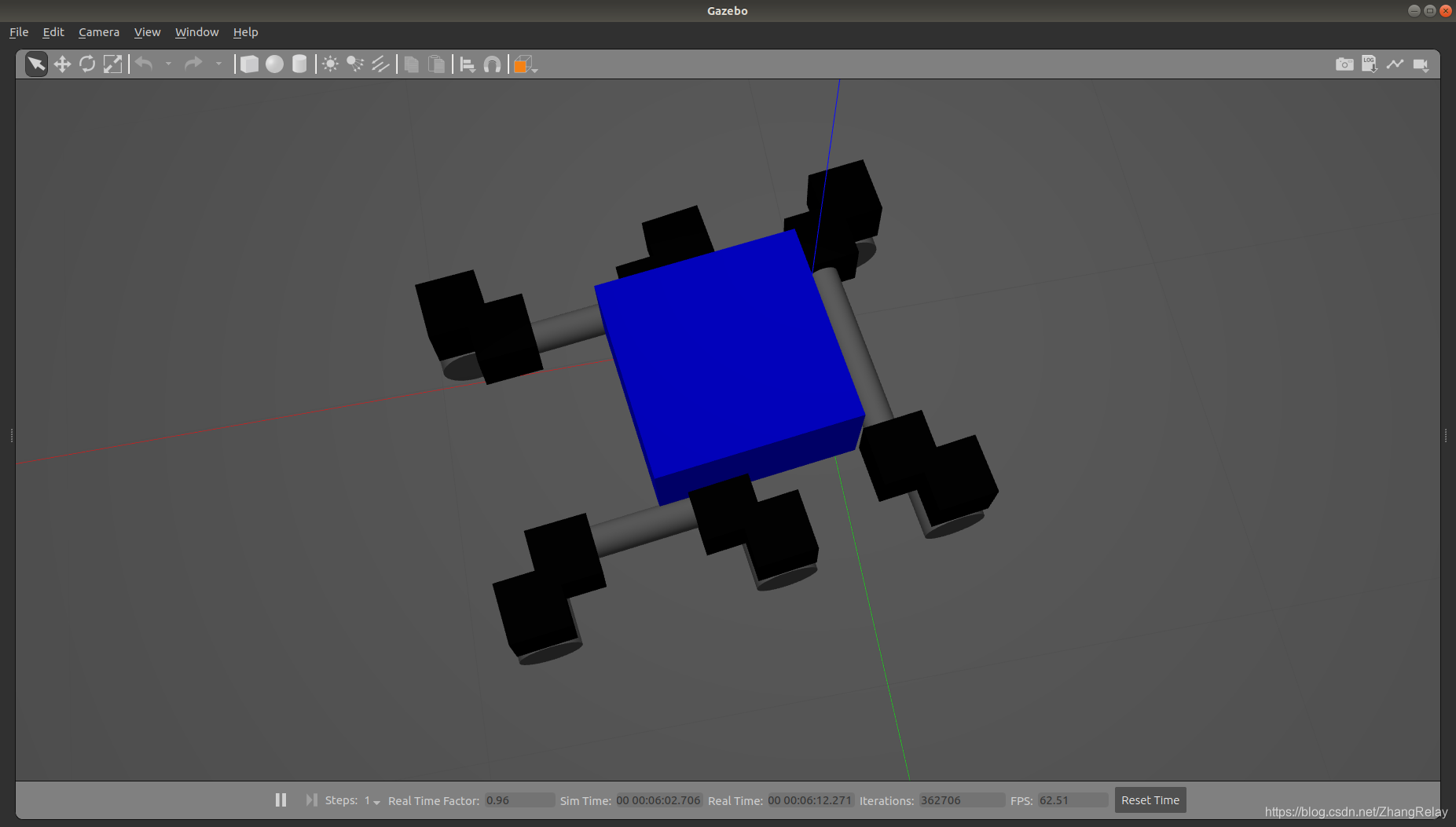
gazebo视角2:
借助此案例可以复习之前学习和实践过的各类指令和算法,如:
- ros2 topic
- rqt
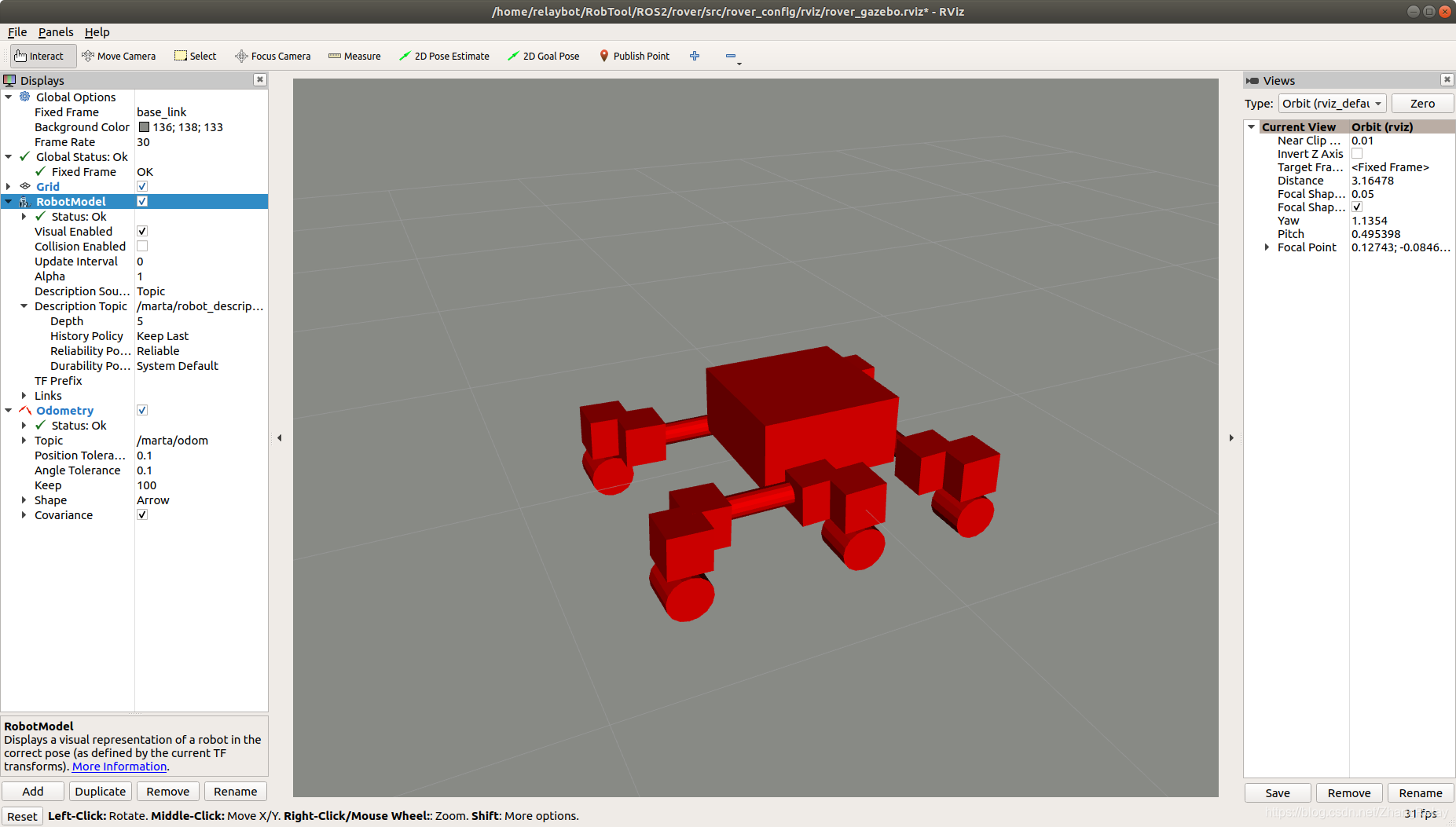
- rviz2
rviz2:
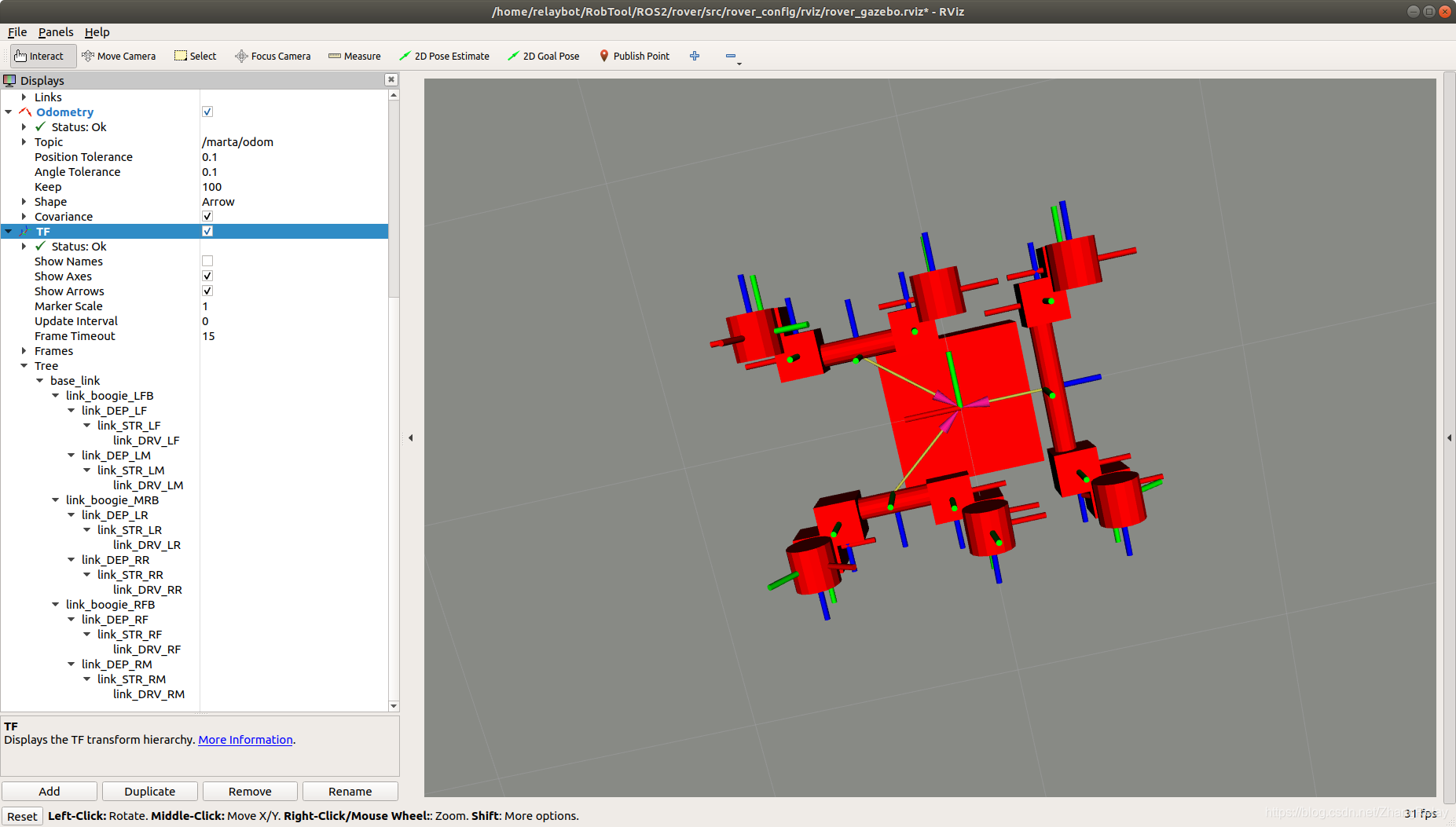
tf:
 本文介绍欧洲航天局ESA在ROS2上的一个实际案例,通过github源码分享,详细探讨了如何使用ros2launch运行rover_simulation,以及如何通过不同视角观察gazebo仿真环境。案例中复习了多种ROS2常用指令和算法,如ros2topic、rqt、rviz2和tf等,为读者提供了一个深入理解ROS2应用的机会。
本文介绍欧洲航天局ESA在ROS2上的一个实际案例,通过github源码分享,详细探讨了如何使用ros2launch运行rover_simulation,以及如何通过不同视角观察gazebo仿真环境。案例中复习了多种ROS2常用指令和算法,如ros2topic、rqt、rviz2和tf等,为读者提供了一个深入理解ROS2应用的机会。
欧洲航天局ESA的ROS2案例,源码在github上。
使用:ros2 launch rover_simulation simulation_control.launch.py
gazebo视角1:
gazebo视角2:
借助此案例可以复习之前学习和实践过的各类指令和算法,如:
rviz2:
tf:
 1710
573
1710
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























