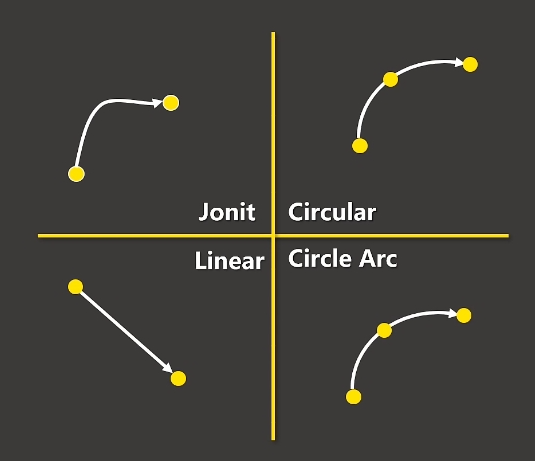
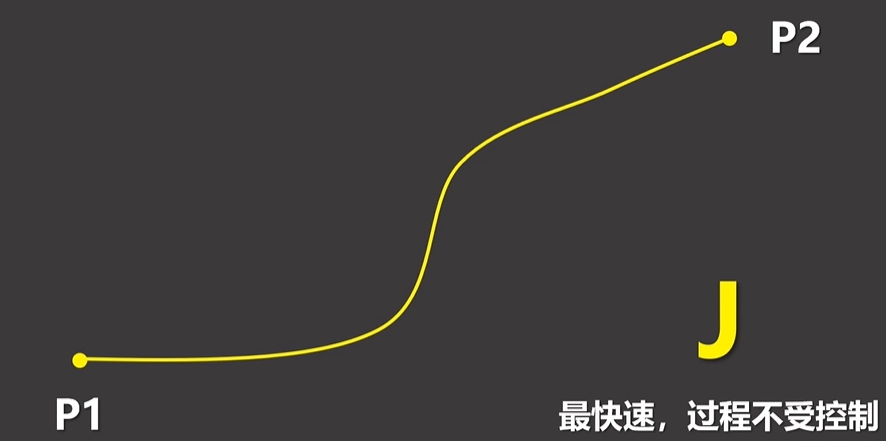
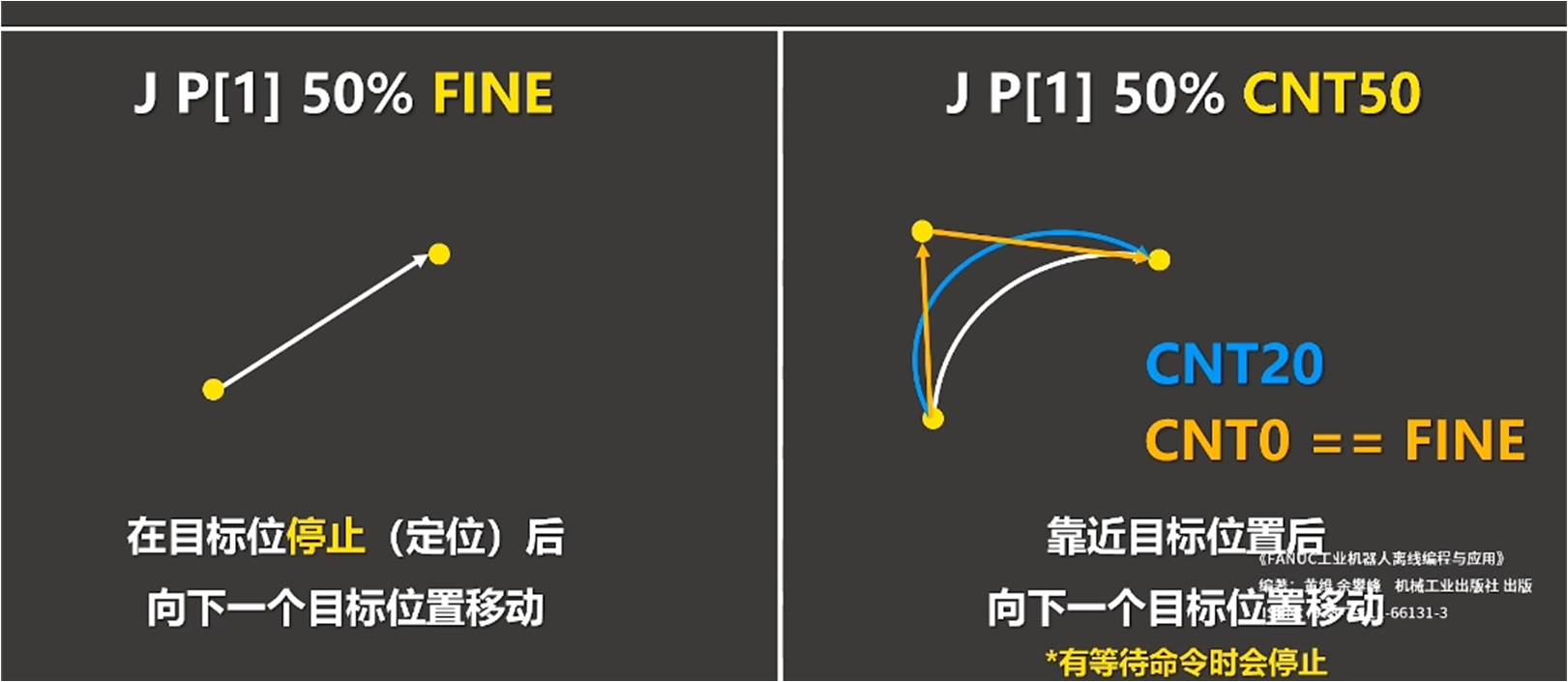
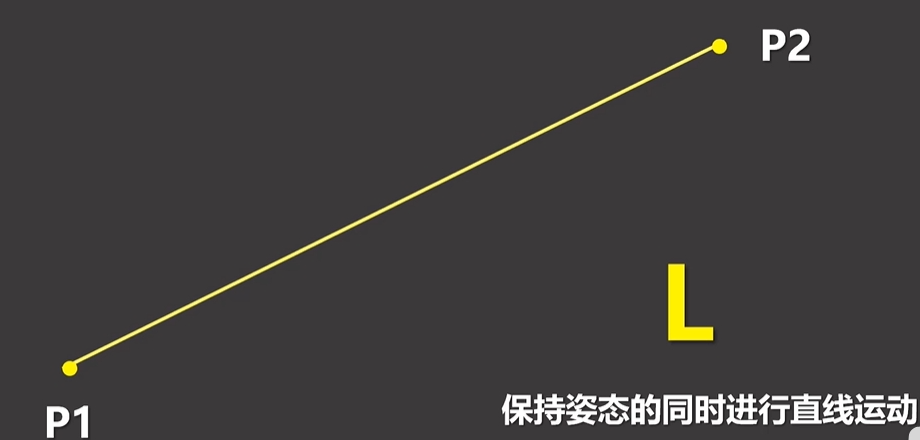
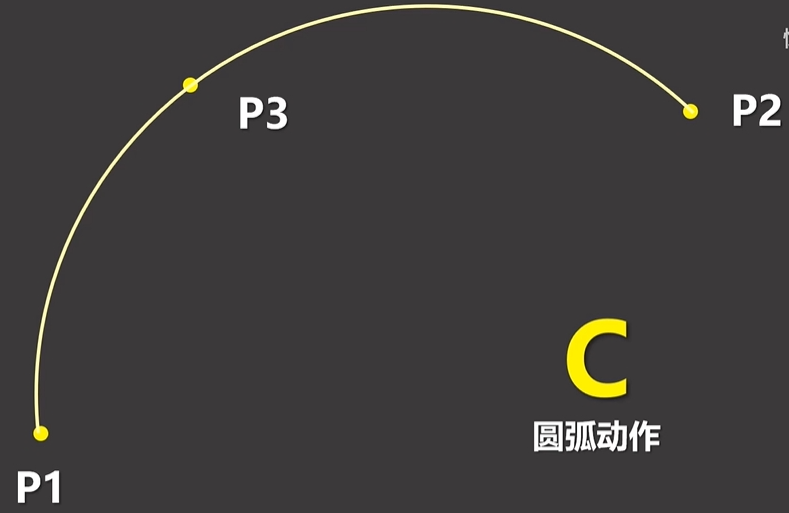
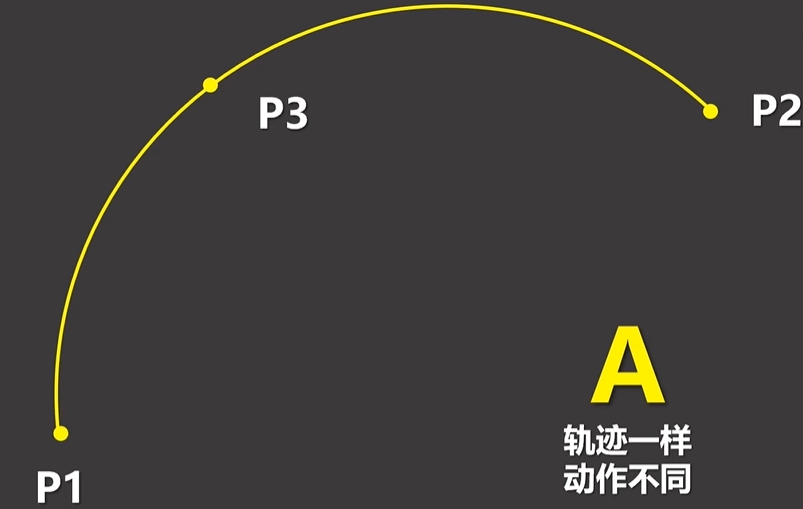
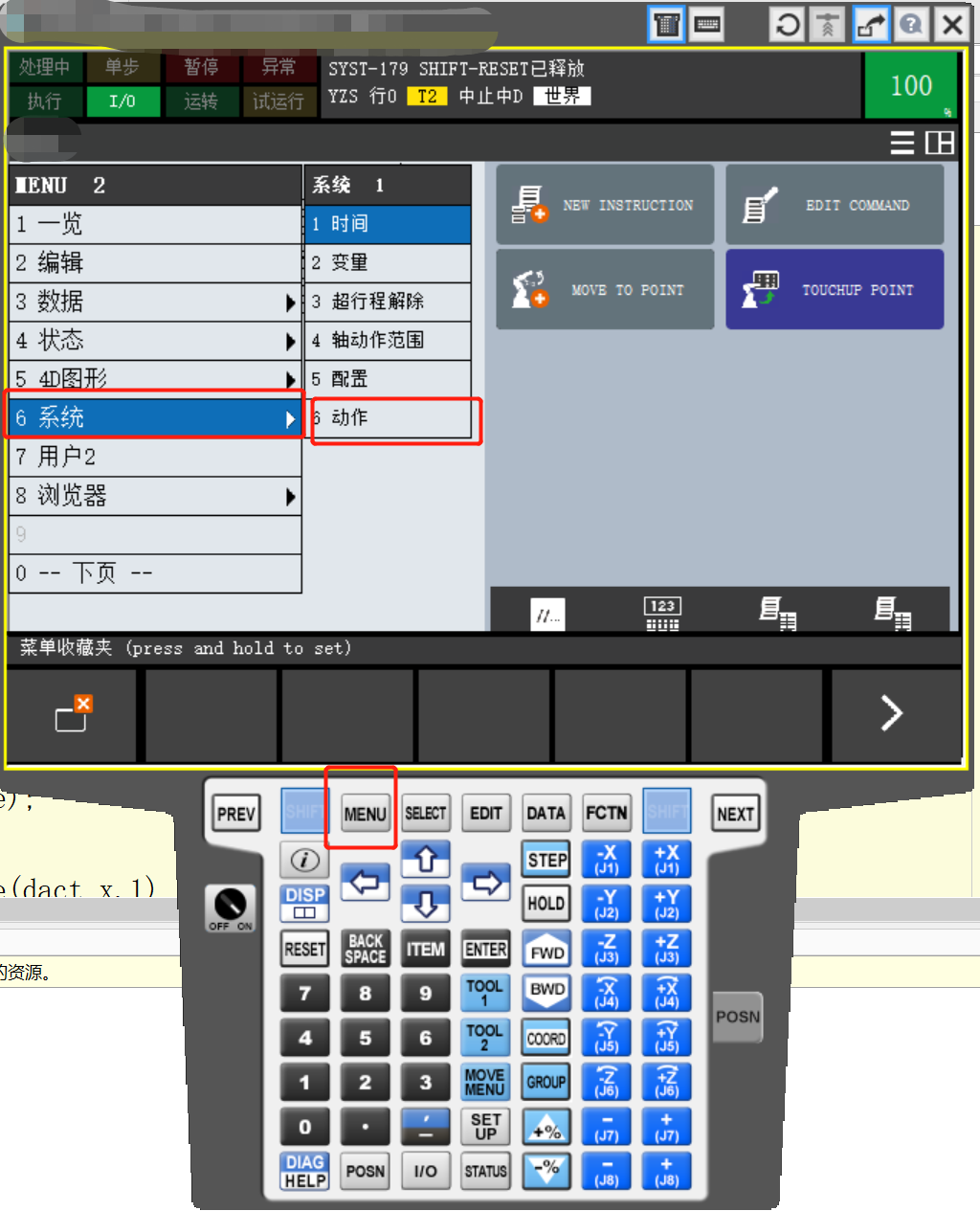
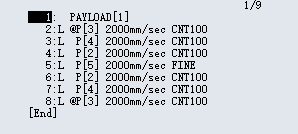
1.运动指令 定位类型 定义P1起始点,P2终点 1.1.J命令 1.2.L命令 1.3.C命令 1.4.A命令 2.其他命令 2.1设置负载 负载指令一般放置于程序的首行,在下面示例中,将负载设定条件设置为1
 发那科ROBOGUIDE运动及负载指令
发那科ROBOGUIDE运动及负载指令

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























 579
579





