




简介
RRT 算法(快速扩展随机树,rapidly exploring random tree)是一种随机性算法,它可以直接应用于非完整约束系统的规划,不需进行路径转换,所以它的算法复杂度较小,尤为适用于高维多自由度的系统。
缺点是得到的路径质量不是很好。
其思想是快速扩张一群像树一样的路径以探索(填充)空间的大部分区域,伺机找到可行的路径。
RRT 的基本步骤是:
1. 起点作为一颗种子,从它开始生长枝丫;
2. 在机器人的“构型”空间中,生成一个随机点X;
3. 在树上找到距离X最近的那个点,记为Y吧;
4. 朝着X的方向生长,如果没有碰到障碍物就把生长后的树枝和端点添加到树上,返回 2;
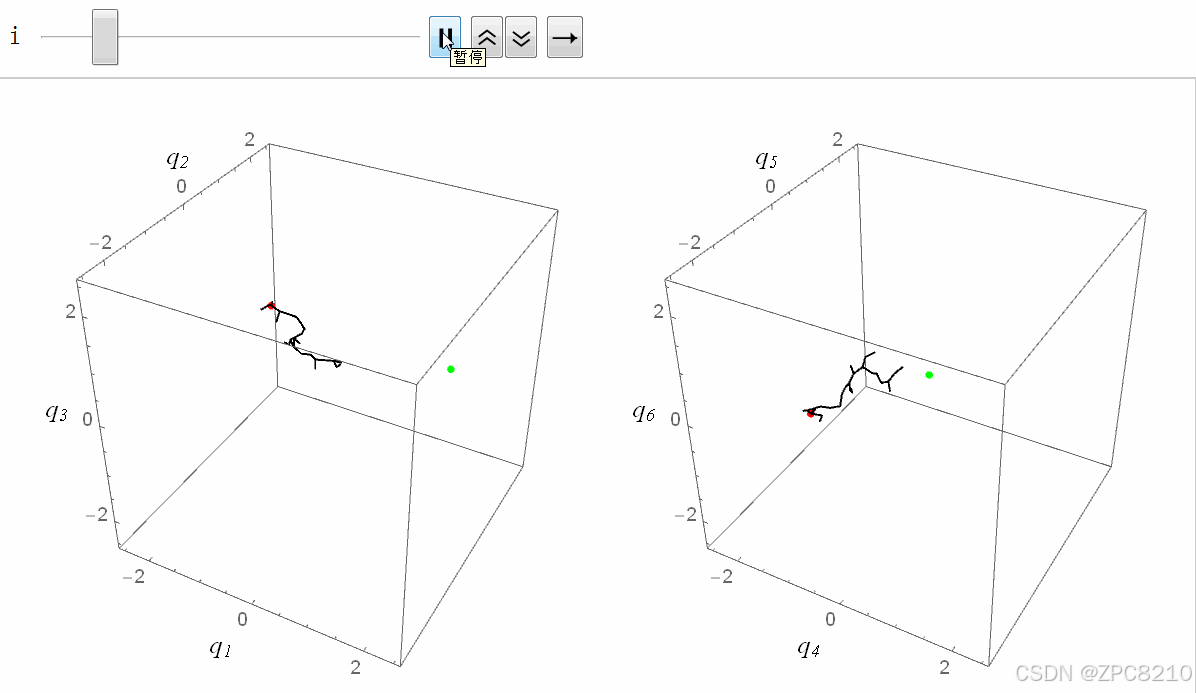
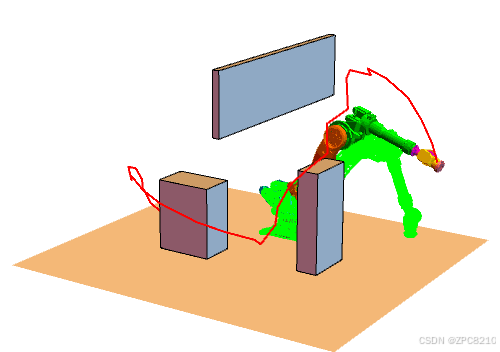
六维空间的RRT
伪代码
function BuildRRT(qinit, K, Δq)
T.init(qinit)
for k = 1 to K
qrand = Sample() -- chooses a random configuration
qnearest = Nearest(T, qrand) -- selects the node in the RRT tree that is closest to qrand
if Distance(qnearest, qgoal) < Threshold then
return true
qnew = Extend(qnearest, qrand, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









