



一、Parameters
1、Phase Accumulator Precision(相位累加器精度)
相位累加器(Phase Accumulator)
- 每个时钟周期累加一个 相位增量值(FCW, Frequency Control Word)。
- 累加结果就是当前的相位值。
2、Angular Resolution(角度分辨率)
定义
- 指相位累加器输出到波形查找表(LUT)时,用于查表的 相位位数。
- 控制相位到波形索引的精细程度。
原理
- 相位累加器的位宽可能很大(比如 32 位),但波形表不可能有 2^32 个采样点,那会占用巨量 ROM。
- 所以 NCO 只取相位累加器的 高几位 作为 ROM 地址,这个高几位的数量就是 Angular Resolution。
影响
- Angular Resolution 高 → ROM 地址多 → 波形更平滑 → 杂散小(SFDR 高)
- Angular Resolution 低 → ROM 地址少 → 波形台阶感明显 → 杂散大,但资源占用少
举例
- 相位累加器:32 位
- Angular Resolution:10 位
- 波形表深度: 2^10 = 1024 个采样点
- 每个采样点代表 360°/1024≈0.3516°的相位间隔
3、Magnitude Precision(幅度精度)
定义
- 指波形表(ROM)每个采样点存储的幅度数据的位数。
- 也就是 正弦/余弦值的量化精度。
影响
- Magnitude Precision 高 → 幅度刻度细 → 失真小,信噪比高 → 占用存储多
- Magnitude Precision 低 → 占用存储少,但幅度量化误差大,输出波形失真大
举例
- Magnitude Precision = 12 → 每个采样点用 12 位存储幅度值(0~4095)
- 如果输出到一个 12 位 DAC,就非常匹配
- 如果输出只接到一个 8 位 DAC,那 12 位精度就有点浪费
4、总结
- Phase Accumulator Precision(相位累加器精度)
NCO 里相位累加器寄存器的位宽(比如 32 位),决定了频率分辨率(Freq Resolution = f_clk/2^(PhaseAccWidth))。
Angular Resolution(角度分辨率)
从相位累加器的高位中取多少位做查表地址。决定 LUT 的深度。
Magnitude Precision(幅度精度)
LUT 每个采样点存储的幅度值位宽(比如 12 位、16 位),决定输出幅度的量化精度。
Angular Resolution和 Magnitude Precision二者独立设置
二、思维误区
错误想法:
若Angular Resolution = 10 ,则LUT只有1024 个采样点,如果使用10位宽Magnitude Precision,则刚好覆盖0000000000--1111111111,而位宽小于10,则不能填满1024个地址,位宽大于10则会有一些值超过地址覆盖范围。
但实际上 NCO 的 LUT 是二维的概念:
- 横向(地址)由 Angular Resolution 决定
- 纵向(存储值)由 Magnitude Precision 决定
它们在硬件结构上是两组完全独立的位宽参数:
- LUT 的地址宽度由 Angular Resolution 决定
- LUT 的数据宽度由 Magnitude Precision 决定
所以 Magnitude Precision 和 Angular Resolution 在数值上没有必然的大小关系,只是在最终输出质量上会共同作用。
假设:
- Phase Accumulator Precision = 32
- Angular Resolution = 10(即 1024 点的波形表)
- Magnitude Precision = 14(幅度值用 14 位表示)
硬件含义:
- 相位累加器每个时钟加一个增量(频率控制字),精度 2^{-32}
- 取累加器高 10 位作为 LUT 地址(共 1024 个采样点)
- 每个 LUT 采样点存 14 位幅度值(即纵向有 2^14 个离散刻度)
这样虽然“横向采样点”只有 1024 个,但每个点的“纵向幅度刻度”很细(14 位),输出到 DAC 时纵向失真会小。
举例说明
例子设定
- 相位点数(Angular Resolution)固定为 8 个点(地址 0~7,对应 0°, 45°, 90°, ...)。
- 正弦波:
- 量化规则(有符号):

- B = 4 → S=7
- B = 6 → S=31
真正用 4 位 生成 LUT
|
地址 |
θ (°) |
真值 y |
S=7 |
LUT整数 Q |
重构值 Q/S |
误差 |
|
0 |
0 |
0.000000 |
7 |
0 |
0.000000 |
0 |
|
1 |
45 |
0.707107 |
7 |
5 |
0.714286 |
+0.007179 |
|
2 |
90 |
1.000000 |
7 |
7 |
1.000000 |
0 |
|
3 |
135 |
0.707107 |
7 |
5 |
0.714286 |
+0.007179 |
|
4 |
180 |
0.000000 |
7 |
0 |
0.000000 |
0 |
|
5 |
225 |
-0.707107 |
7 |
-5 |
-0.714286 |
-0.007179 |
|
6 |
270 |
-1.000000 |
7 |
-7 |
-1.000000 |
0 |
|
7 |
315 |
-0.707107 |
7 |
-5 |
-0.714286 |
-0.007179 |
真正用 6位 生成 LUT
|
地址 |
θ (°) |
真值 y |
S=31 |
LUT整数 Q |
重构值 Q/S |
误差 |
|
0 |
0 |
0.000000 |
31 |
0 |
0.000000 |
0 |
|
1 |
45 |
0.707107 |
31 |
22 |
0.709677 |
+0.002570 |
|
2 |
90 |
1.000000 |
31 |
31 |
1.000000 |
0 |
|
3 |
135 |
0.707107 |
31 |
22 |
0.709677 |
+0.002570 |
|
4 |
180 |
0.000000 |
31 |
0 |
0.000000 |
0 |
|
5 |
225 |
-0.707107 |
31 |
-22 |
-0.709677 |
-0.002570 |
|
6 |
270 |
-1.000000 |
31 |
-31 |
-1.000000 |
0 |
|
7 |
315 |
-0.707107 |
31 |
-22 |
-0.709677 |
-0.002570 |
把 4 位整数左移 2 位当作 6 位(4 位 Q × 4,相当于左移 2 位,范围虽然变成了 ±28,但值不是重新计算出来的)
|
地址 |
θ (°) |
原4位整数 Q |
左移2位 Q' |
重构值 Q'/31 |
真值 y |
误差 |
|
0 |
0 |
0 |
0 |
0.000000 |
0.000000 |
0 |
|
1 |
45 |
5 |
20 |
0.645161 |
0.707107 |
-0.061946 |
|
2 |
90 |
7 |
28 |
0.903226 |
1.000000 |
-0.096774 |
|
3 |
135 |
5 |
20 |
0.645161 |
0.707107 |
-0.061946 |
|
4 |
180 |
0 |
0 |
0.000000 |
0.000000 |
0 |
|
5 |
225 |
-5 |
-20 |
-0.645161 |
-0.707107 |
+0.061946 |
|
6 |
270 |
-7 |
-28 |
-0.903226 |
-1.000000 |
+0.096774 |
|
7 |
315 |
-5 |
-20 |
-0.645161 |
-0.707107 |
+0.061946 |
结果对比
|
方法 |
45° 误差 |
90° 误差 |
|
4 位重新量化 |
+0.007179 |
0 |
|
6 位重新量化 |
+0.002570 |
0 |
|
4 位直接左移成 6 位 |
-0.061946 |
-0.096774 |
- 真正的 6 位量化:比 4 位误差更小,精度提升明显(量化步长从 1/7 ≈ 0.142857 降到 1/31 ≈ 0.032258)。
- 直接放大:反而比原来更不准,因为数值间的细节根本没增加,只是拉伸了原来的误差。
结论
Magnitude Precision 提高时,必须在 LUT 生成阶段用高精度重新计算,才能真的减少量化误差。
Angular Resolution(相位精度)和 Magnitude Precision(幅度精度)是独立的:
- Angular Resolution 不变时,增加 Magnitude Precision 可以让采样点的纵向精度更高。
- 反之,只是放大低精度数据是徒劳的。
三、Implementation
1、Modulation
(1)Frequency Modulation (频率调制)
-
给 相位累加器 的增量输入(Phase Increment),也就是说它控制每个时钟周期相位累加器增加的值。
-
改变这个输入,相当于动态调整输出波形的频率。
-
简单来说,频率调制输入决定了输出信号的瞬时频率。
-
典型应用:调频 (FM)、扫频(频率扫描)、动态改变输出频率。
-
输入值越大,输出频率越高。
(2)Phase Modulation (相位调制) 输入
-
直接加在相位累加器当前值上的一个相位偏移量。
-
也就是说它直接改变当前的相位值,产生相位偏移。
-
改变这个输入,会导致输出波形在时间上的偏移,但频率保持不变。
-
典型应用:相位调制(PM)、相位调整、相位跳变或相位调节。
-
输入值越大,相位偏移越大,波形相应地提前或滞后。
(3)对比
|
特征 |
频率调制 (Frequency Modulation) |
相位调制 (Phase Modulation) |
|
作用对象 |
相位累加器的 增量 |
相位累加器的 当前相位值 |
|
控制输出 |
改变输出的频率 |
改变输出的相位 |
|
时域表现 |
输出波形频率变化,周期改变 |
输出波形时间偏移,相位偏移 |
|
应用场景 |
频率调制 (FM)、扫频 |
相位调制 (PM)、相位跳变、相位校准 |
|
输入端口性质 |
通常为频率步进值,动态变化 |
通常为相位偏移量,可以是瞬时的或逐步变化 |
(4)举例说明
假设条件
· NCO时钟频率固定为 1 MHz(时钟周期 1μs)
· 相位累加器宽度 16 位(范围 0 ~ 65535)
· 输出波形是正弦波,周期由相位累加器增量(频率控制字)决定
频率调制 (Frequency Modulation) 示例
频率控制字 (Phase Increment) = 6553
输出频率计算:

观察效果:
NCO 每个时钟周期将相位累加器加 6553,输出波形是 100kHz 正弦波。
调制过程:
如果你把频率控制字变成 13106(翻倍),频率变成 200kHz。
频率控制字变成 3276,频率变成 50kHz。
总结:频率调制就是控制这个相位增量,让输出波形的频率变快或变慢。
相位调制 (Phase Modulation) 示例
仍然使用固定频率控制字 6553(频率 100kHz)
在某一时刻,给相位累加器当前值加一个 相位偏移,比如加 16384(相位范围是 0~65535,16384约等于1/4周期的相位偏移)
观察效果:
输出波形的相位整体“提前”了 1/4 周期,相当于波形整体向左平移了 2.5μs(100kHz的波长是10μs,1/4就是2.5μs),但频率保持不变。
调制过程:
你可以动态改变相位偏移值,产生相位跳变、相位调节,波形看起来“瞬时位移”。
2、Multi-Channel NCO
功能:
让一个 NCO IP 同时支持多个“虚拟”NCO 通道,每个通道可以有独立的相位累加器状态,但共享同一套正弦/余弦查找表(LUT)和硬件资源。
原理:
- 在普通 NCO 里,相位累加器状态是唯一的,每个时钟更新一次。
- 在 Multi-Channel 模式下,内部会为每个通道维护一个独立的相位寄存器,并用多路复用器(MUX)按通道轮流送入相位增量器和 LUT。
- 这样做可以用一套硬件轮流为多个通道产生信号,节省 FPGA 资源。
应用场景:
- 多音信号生成(比如 8 个不同频率/相位的载波)
- 多通道通信系统(每个通道都有自己的调制/解调载波)
注意事项:
- 输出是时分复用的,每个通道的更新速率 = NCO 时钟 / 通道数
- 如果通道数多,单个通道的采样率会降低
3、Frequency Hopping
功能:
在运行过程中快速切换 NCO 的输出频率(跳频),并且切换时保持相位连续(或可选相位重置)。
原理:
- 普通 NCO 固定使用一个
phase_inc(相位增量) - Frequency Hopping 模式会提供一个频率表(多个
phase_inc值) - 你可以在运行中选择表中的不同频率索引,NCO 会立即加载新的相位增量
- 如果选择了相位连续模式,切换频率时不清零相位累加器 → 波形不会出现相位跳变
- 如果选择了相位重置模式,切换时会清零相位累加器 → 波形从头开始
应用场景:
- FHSS(频率跳变扩频)
- 多信道雷达扫频
- 短时间内切换多种载波频率
四、效果
Generation Algorithm使用small rom,系统开始时nco_rst_n和nco_clken复位,第二个时钟开始工作,可以看到nco_out_valid_nc从cursor1到cursor2经过10个时钟开始有效,与如下用户手册说明一致。

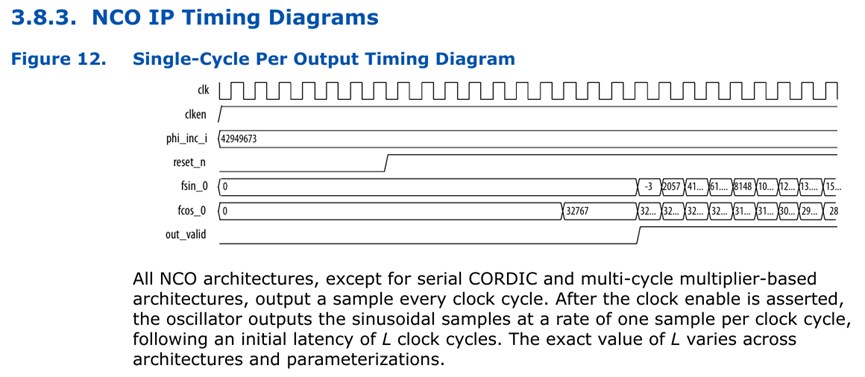
Generation Algorithm使用CORDIC时,可以看到nco_out_valid_nc从cursor1到cursor2经过27个时钟开始有效,且能看出该算法杂散较大。


















 8640
8640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









