



 本文详细介绍使用C++在ROS环境中实现机器人定点巡航的方法。通过具体代码示例,讲解了如何利用move_base_action进行路径规划及目标点设置,实现机器人在预设路径上的自主导航。
本文详细介绍使用C++在ROS环境中实现机器人定点巡航的方法。通过具体代码示例,讲解了如何利用move_base_action进行路径规划及目标点设置,实现机器人在预设路径上的自主导航。
关于STDR仿真器的定点巡航,ROS小课堂提供了非常详细的教程http://www.corvin.cn/892.html,作者是用python写的巡航脚本,下面提供一下C++版本的巡航代码。若有错误欢迎批评指正!
安装STDR仿真器
$ cd catkin_ws/src
$ git clone https://github.com/stdr-simulator-ros-pkg/stdr_simulator.git
$ cd ..
$ catkin_make修改CMakeList.txt文件
add_executable(patrot_action src/patrot_action.cpp)
target_link_libraries( patrot_action ${catkin_LIBRARIES})
add_dependencies(patrot_action ${${PROJECT_NAME}_EXPORTED_TARGETS})创建名为parbot_action的巡航代码
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
#include <iostream>
#include "geometry_msgs/PoseWithCovarianceStamped.h"
using namespace std;
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
// 当action完成后会调用次回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state, const move_base_msgs::MoveBaseResultConstPtr& result)
{
ROS_INFO("Goal succeeded!");
//ros::shutdown();
}
// 当action激活后会调用次回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
// 收到feedback后调用的回调函数
void feedbackCb(const move_base_msgs::MoveBaseFeedbackConstPtr& feedback)
{
}
// 设置机器人的初始位置
void setInitial_pose( ros::Publisher pub)
{
geometry_msgs::PoseWithCovarianceStamped msg_poseinit;
msg_poseinit.header.frame_id = "map";
msg_poseinit.header.stamp = ros::Time::now();
msg_poseinit.pose.pose.position.x = 1.0127655236;
msg_poseinit.pose.pose.position.y = 1.99814241133;
msg_poseinit.pose.pose.position.z = 0.000;
msg_poseinit.pose.pose.orientation.x = 0.000;
msg_poseinit.pose.pose.orientation.y = 0.000;
msg_poseinit.pose.pose.orientation.z = 8.56034501716e-05;
msg_poseinit.pose.pose.orientation.w = 0.999999996336;
pub.publish(msg_poseinit);
ros::Duration(1.0).sleep();
}
typedef struct _POSE
{
double X;
double Y;
double Z;
double or_x;
double or_y;
double or_z;
double or_w;
} POSE;
//设置导航的定位点
POSE pose1 = {13.2, 1.590, 0.000, 0.000, 0.000, 0.006, 0.999};
POSE pose2 = {13.8, 12.33, 0.000, 0.000, 0.000, 0.990, 0.038};
POSE pose3 = {5.53, 12.48, 0.000, 0.000, 0.000, 0, 1.0};
POSE pose4 = {1.0, 2.0, 0.0, 0.0, 0.0, 0.0, 0.1};
void setGoal(POSE pose)
{
// 定义客户端
MoveBaseClient ac("move_base", true);
// 等待服务器
while(!ac.waitForServer(ros::Duration(5.0))){
ROS_WARN("Waiting for the move_base action server to come up");
}
// 创建action的goal
move_base_msgs::MoveBaseGoal goal;
// 发送位置坐标
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = pose.X;
goal.target_pose.pose.position.y = pose.Y;
goal.target_pose.pose.position.z = pose.Z;
goal.target_pose.pose.orientation.x = pose.or_x;
goal.target_pose.pose.orientation.y = pose.or_y;
goal.target_pose.pose.orientation.z = pose.or_z;
goal.target_pose.pose.orientation.w = pose.or_w;
ROS_INFO("Sending goal");
// 发送action的goal给服务器端,并且设置回调函数
ac.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
// 等待结果
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
{
ROS_INFO("it is successful");
}
else
{
ROS_ERROR("The base failed move to goal!!!");
}
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "base_pose_control");
ros::NodeHandle n;
ros::Publisher pub_initialpose = n.advertise<geometry_msgs::PoseWithCovarianceStamped>("/initialpose", 10);
setInitial_pose(pub_initialpose);//发送初始位置
MoveBaseClient ac("move_base", true);
int locations_cnt = 2; //设定巡航圈数
int loop_cnt=0;//当前巡航圈数
while(ros::ok())
{
if(loop_cnt<locations_cnt)
{
loop_cnt += 1;
ROS_INFO("Left loop cnt:%d",locations_cnt-loop_cnt);
setGoal(pose1);
setGoal(pose2);
setGoal(pose3);
}
// 巡航结束后返回原点
else
{
setGoal(pose4);
ROS_INFO("Navigation test finished");
ros::shutdown();
}
ros::spinOnce();
//rate_loop.sleep();
}
return 0;
}
运行launch和巡航节点
launch文件包括启动STDR仿真器、move_base和amcl(按照ROS小课堂教程创建即可)。
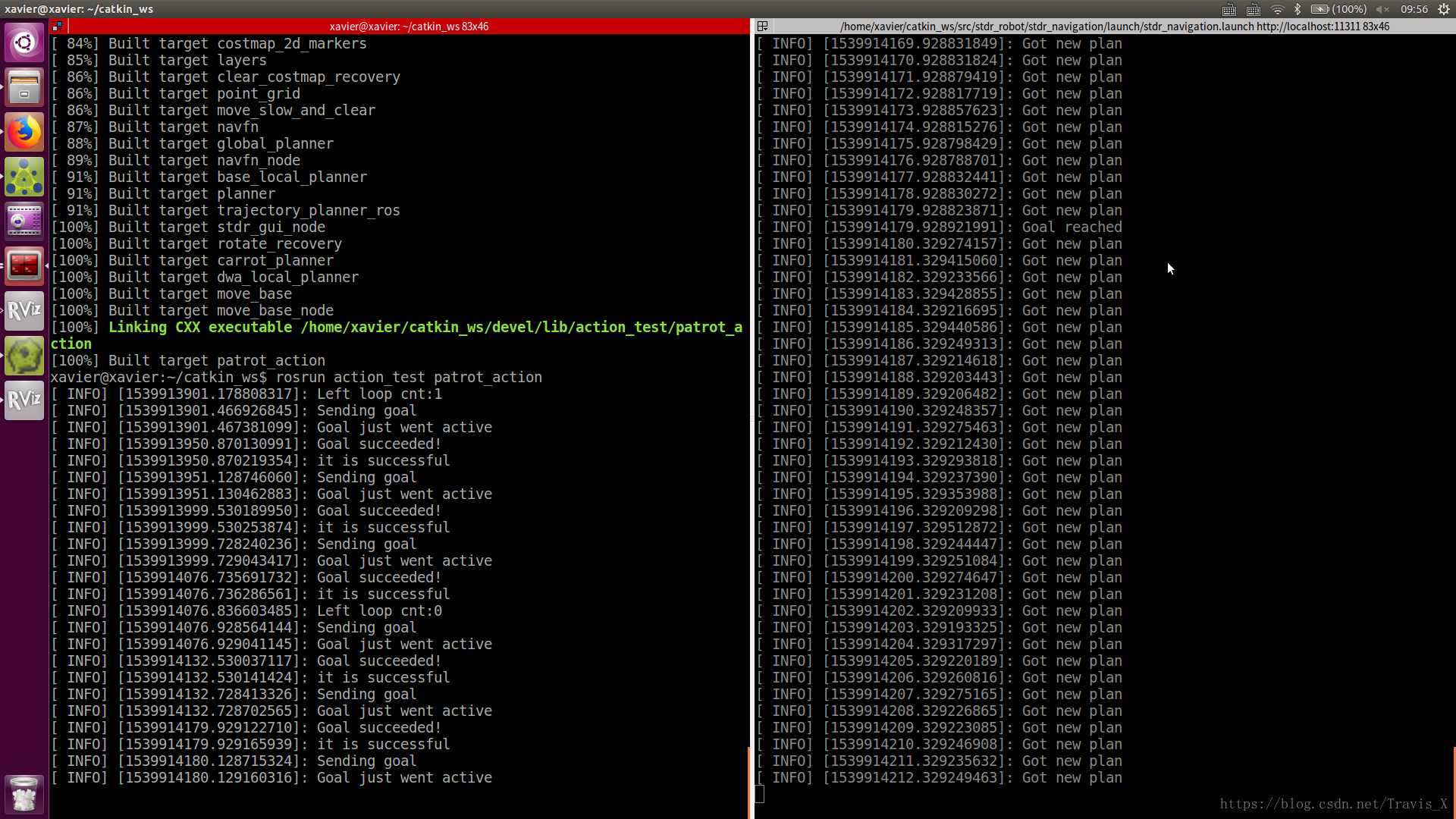
$ roslaunch stdr_navigation stdr_navigation.launch
$ rosrun action_test patrot_action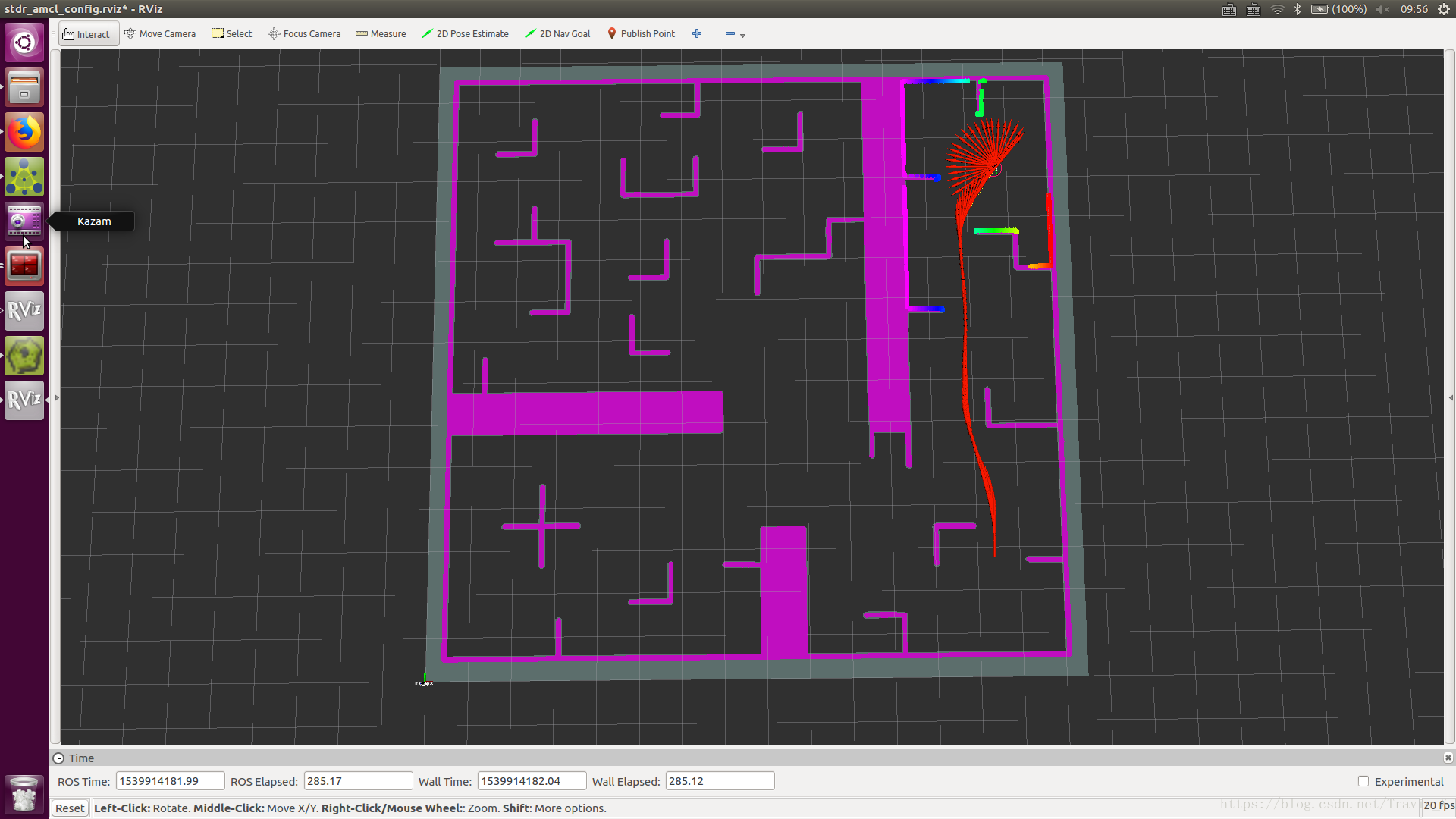


















 927
927

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











