







 超级会员免费看
超级会员免费看
 本文详细介绍了Fast-Tracker系统,一种在复杂环境中跟踪目标的无人飞行器解决方案。它由目标运动预测和轨迹跟踪规划两部分组成。目标预测采用贝塞尔曲线,轨迹规划使用混合A*算法和时空轨迹优化。Fast-Tracker的源码结构包括car_planner、common_utils、tracking_utils、traj_server和plan_manage,涉及地图生成、无人机模拟、目标检测、路径搜索等多个模块。
本文详细介绍了Fast-Tracker系统,一种在复杂环境中跟踪目标的无人飞行器解决方案。它由目标运动预测和轨迹跟踪规划两部分组成。目标预测采用贝塞尔曲线,轨迹规划使用混合A*算法和时空轨迹优化。Fast-Tracker的源码结构包括car_planner、common_utils、tracking_utils、traj_server和plan_manage,涉及地图生成、无人机模拟、目标检测、路径搜索等多个模块。
标题:Fast-Tracker: A Robust Aerial System for Tracking Agile
Target in Cluttered Environments
作者:Zhichao Han*, Ruibin Zhang*, Neng Pan*, Chao Xu, and Fei Gao
来源:https://arxiv.org/pdf/2011.03968v1.pdf
代码:https://github.com/ZJU-FAST-Lab/Fast-tracker
文章目录
简介
Fast-Tracker是浙江大学空中机器人实验室提出的一种系统化的解决方案,它可以无人飞行器 (UAV) 在混乱复杂的环境中自主安全地跟踪目标。
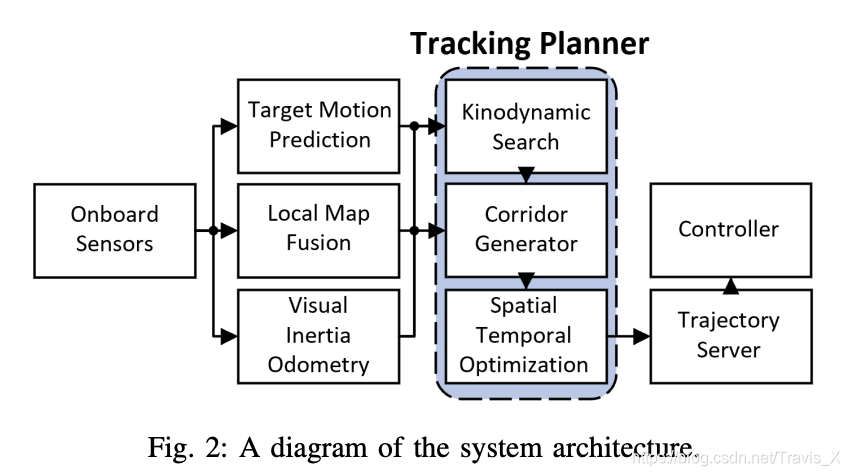
Fast-Tracker主要分为两个部分:目标运动预测和轨迹跟踪规划。
目标运动预测:利用目标历史的观测值信息,在考虑目标动态约束的情况下预测目标的未来运动轨迹。
轨迹跟踪规划器:传统的规划结构。前端采用考虑运动学的搜索方法,通过启发式的方法搜索出一条安全的跟踪轨迹。后端优化器将其优化为时空最优且无碰撞的轨迹。
系统框架组成
Fast-Planner开源的工具包主要是包含了五个文件夹,分别是car_planner、common_utils、plan_manage、tracking_utils、traj_server。
-
car_planner:模拟的是跟踪的目标,跟随着在地图中搜索的运动学上可行的路径移动。
-
common_utils:包含地图环境的生成、无人机模拟器、rviz插件等。
-
plan_mana

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 521
521

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











