







 超级会员免费看
超级会员免费看
标题:TSO-HA*-Net: A Hybrid Global Path Planner for the Inspection Vehicles Used in Caged Poultry Houses
作者:Yueping Sun , Zhangmingxian Cao , Weihao Yan , Xueao Lv , Ziheng Zhang, De’an Zhao
来源:https://www.mdpi.com/2077-0472/15/5/532
代码:https://github.com/UJS-Cyber-Lab/TSO-HAstar-Net/tree/main
文章目录
一、研究背景
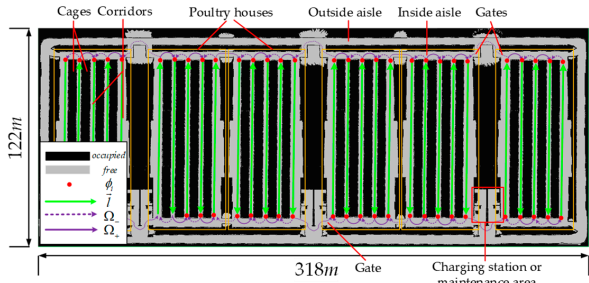
- 研究问题:这篇文章要解决的问题是传统基于轨道的检查方案在笼养家禽舍中存在轨道易损坏、维护繁琐的问题,而现有的无轨替代方案则缺乏稳健可靠的路径规划器。
- 研究难点:该问题的研究难点包括:如何在复杂的环境中实现高效、平滑的路径规划,同时保证路径的全局最优性和实时性。
- 相关工作:该问题的研究相关工作有:基于轨道的检查系统如ChickenBoy,以及基于无轨的检查系统如使用A*算法、Dijkstra算法和Reeds-Shepp曲线算法的检查车辆。然而,这些方法在路径规划的连续性和全局优化方面仍存在不足。
二、研究方法
论文提出了TSO-HA*-Net,一种混合全局路径规划器,用于笼养家禽舍中的车辆检查。
2.1 TSO-HA*算法
首先,采用时空优化的混合A*(TSO-HA*)算法作为底层规划机制,通过将预定义的检查规则集成到家禽舍的全局网格图中,高效构建半结构化拓扑网络。该算法通过改进的启发式值计算和简化的占用网格模板进行碰撞检测,提高了计算效率。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 734
734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











