




微信搜索:ReCclay,即可免费阅读博主蓝桥系列所有文章,后台回复“代码”即可获取蓝桥所有备赛代码!关注博主公众号,还可拥有加入博主粉丝群实时沟通技术难题、免费下载优快云资源等多项福利,还在等什么呢?快快扫码关注,学习才不会迷路。

这里再向各位同学推荐一个优快云博主 ReRrain 的蓝桥备赛博客,博主秉持初学者思路,向你讲述自己蓝桥备赛的心路历程,娓娓道来蓝桥备赛经验,个人觉得非常不错,值得细细品读。
文章目录
导读:《蓝桥杯嵌入式组》专栏文章是博主2019年参加蓝桥杯的嵌入式组比赛所做的学习笔记,在当年的比赛中,由于忙于准备考研及保研相关工作,博主仅仅参加了当年的省赛,并获得了省赛一等奖的成绩。成绩虽谈不上最好,但至少问心无愧。如今2021年回头再看该系列文章,仍然感触颇多。为了能更好地帮助到单片机初学者,今年特地抽出时间对当年的文章逻辑和结构进行重构,以达到初学者快速上手的目的。需要指出的是,由于本人水平有限,如有错误还请读者指出,非常感谢。那么,接下来让我们一起开始愉快的学习吧。
“一叶遮目,不见泰山”。不论何事,只有把握事情的总体趋势,才能做到心中有数。
一、主要代码
main.c
/*******************************************************************************
* 文件名:main.c
* 描 述:
* 作 者:CLAY
* 版本号:v1.0.0
* 日 期: 2019年2月18日
* 备 注:修改后的LCD例程
* PC通过USART2发送数据到单片机,并显示到LCD上(PA2-TXD PA3-RXD)
* 注意发送新行是\r\n,剔除\r显示到屏幕上的乱码影响
*******************************************************************************
*/
#include "stm32f10x.h"
#include "lcd.h"
#include "e2prom.h"
#include "stdio.h"
#include "i2c.h"
#include "adc.h"
#include "rtc.h"
#include "usart2.h"
u32 TimingDelay = 0;
u8 RxdCnt = 0;
u8 RxdOver = 0;
u8 RxdBuf[20];
void Delay_Ms(u32 nTime);
u8 RTC_Flag = 0;
//Main Body
int main(void)
{
u8 i;
STM3210B_LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
SysTick_Config(SystemCoreClock/1000);
USART2_Init();
while(1)
{
if(RxdOver)
{
RxdOver = 0;
LCD_ClearLine(Line5);//清除LCD的对应行
LCD_DisplayStringLine(Line5, RxdBuf);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//接收的数据处理完毕后打开接收中断
for(i=0; i<20; i++)//清空缓冲区
RxdBuf[i] = 0;
}
}
}
//
void Delay_Ms(u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
usart2.c
#include "stm32f10x.h"
void USART2_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
//开启GPIOA和USART2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA ,ENABLE);
//USART2的中断向量配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//RXD-PA3 设置为浮空模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//TXD-PA2 设置为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART2的配置
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);//开启USART2
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启USART2接收中断
}
void USART2_SendString(u8 *str)
{
u8 index = 0;
while(str[index] != 0)
{
USART_SendData(USART2, str[index]);
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == 0);//查询用Flag
index++;
}
}
usart2.h
#ifndef _USART2_H
#define _USART2_H
void USART2_Init(void);
void USART2_SendString(u8 *str);
#endif
stm32f10x_it.c
...
extern u8 RxdCnt;
extern u8 RxdOver;
extern u8 RxdBuf[20];
void USART2_IRQHandler(void)
{
u16 tmp;
if(USART_GetITStatus(USART2, USART_IT_RXNE) == 1)
{
USART_ClearITPendingBit(USART2, USART_IT_RXNE);//中断用IT
tmp = USART_ReceiveData(USART2);
if(tmp == '\n')
{
RxdBuf[RxdCnt-1] = 0;//避免\r显示在LCD发生的乱码
RxdCnt = 0;
RxdOver = 1;
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);//接收完毕后关闭,防止处理过程发生干扰。
}
else
{
RxdBuf[RxdCnt++] = tmp;
}
}
}
...
二、注意事项
2.1、关于USART2的配置可参考例程
路径为:嵌入式设计与开发项目加密资料\嵌入式设计与开发\STM32固件库v3.5\stm32f10x_stdperiph_lib\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\USART\Interrupt\main.c
2.2、USB线对应可直接在PC使用的串口是USART2
2.3、RXD和TXD引脚
PA2为发送引脚,因此要配置成复用输出模式
PA3为接收引脚,因此要配置成浮空输入模式
2.4、接收和发送方式
接收采用中断,发送采用查询
2.5、GPIOA在APB2总线, USART2在APB1总线
2.6、USART_SendData发送数据,USART_ReceiveData接收数据
2.7、查询使用Flag,中断使用IT
while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == 0);//查询用Flag
USART_ClearITPendingBit(USART2, USART_IT_RXNE);//中断用IT
2.8、每次接受完一帧数据后把接收中断失能,待数据处理完毕后再打开接收中断。
2.9、剔除\r在LCD乱码
当接收到\n后,前一个就是\r,所以直接把前一个数据赋值为0,覆盖掉即可。
RxdBuf[RxdCnt-1] = 0;//避免\r显示在LCD发生的乱码
2.10、一帧数据处理完毕后,别忘了清空缓冲区
for(i=0; i<20; i++)//清空缓冲区
RxdBuf[i] = 0;
2.11、关于串口助手
比赛中,赛场提供的串口助手有两个。
超级终端并不好用,推荐使用AccessPort,练习时也尽量使用该工具。
2.12、关于发送数据的一点注意
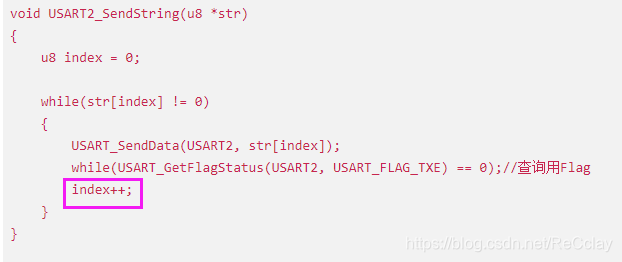
这个index,必须放在下面不要和while连着写,不然会出现第一个字符无法发送的情况。
2.13、还有回车换行的问题
当勾选串口助手的回车换行后,我们判断最后一个字符要写成if(tmp == '\n')。
而加入我们是人为写入\n的话,我们要写成if(tmp == 'n')
结语:以上就是本篇文章的全部内容啦,希望大家可以多多支持我的原创文章。如有错误,请及时指正,非常感谢。
微信搜索:ReCclay,即可免费阅读博主蓝桥系列所有文章,后台回复“代码”即可获取蓝桥所有备赛代码!关注博主公众号,还可拥有加入博主粉丝群实时沟通技术难题、免费下载优快云资源等多项福利,还在等什么呢?快快扫码关注,学习才不会迷路。



















 327
327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











