




机器人仿真平台在机器人开发中发挥着重要作用,其发展历程值得深入探讨。它由模型描述、动力学引擎和渲染引擎三大核心组成,并广泛应用于 Webots 、PyBullet、MuJoCo 和 Isaac 等常见仿真工具。此外,NVIDIA 的 Cosmos 平台和 World Labs 等世界模型技术,能够通过生成合成数据、优化数据处理和提升仿真环境的逼真度,为机器人开发提供高效、低成本的解决方案。
机器人仿真平台
仿真必要性
传统产品开发流程通常包括产品定义、概念设计、方案评审、详细设计、样机试制、测试和方案优化等环节。然而,随着产品复杂度的提高,尤其是对于多自由度的复杂系统(如机器人),这一流程的弊端日益凸显:
1. 硬件的设计、加工和组装过程耗时费力,一旦测试发现问题,优化迭代的周期容易被拉长
2. 虽然软件设计可以在硬件定型前进行,但由于缺乏有效反馈,软件开发往往与实际系统脱节,导致部分组件在实际测试中需要推倒重来,增加了不必要的工作量和成本
为提高开发效率,仿真驱动的开发流程正逐渐成为主流。通过仿真技术,开发者可以在方案评估阶段提前优化设计,减少不合理之处,从而提升后续详细设计的准确性。此外,许多个人开发者和团队缺乏搭建硬件平台的条件,尤其是工业机械臂等设备价格高昂,使机器人爱好者和初学者难以负担。仿真技术则提供了一个低成本的学习与实验环境,使用户能够在虚拟空间中搭建机器人硬件、测试软件算法,加速产品迭代。
什么是仿真
机器人仿真是基于交互式计算机图形技术和机器人学理论,生成机器人的几何图形并进行三维显示,用于描述机器人及其工作环境的动态变化过程。
一个完整的机器人仿真平台主要负责三件事:模型建模、动力学计算和可视化显示。这分别对应仿真平台的三个组成部分:模型描述、物理引擎和渲染引擎。
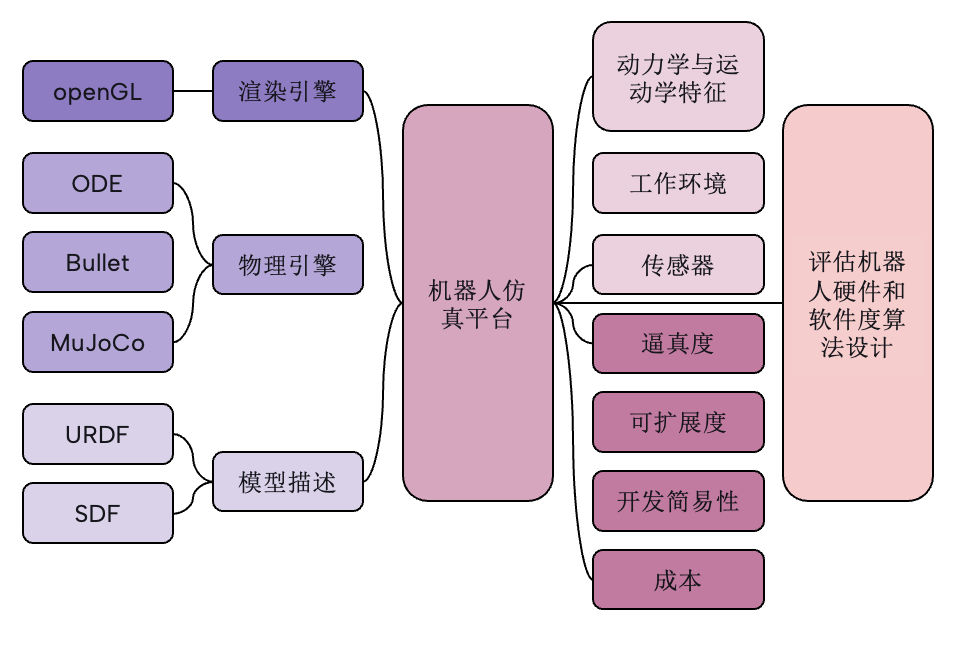
机器人仿真平台示意图
模型描述
模型描述负责机器人的建模,使用计算机语言向仿真平台描述机器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 188
188

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









