




导语:本文深入剖析了青龙全尺寸通用人形机器人硬件平台的设计理念、流程及关键系统设计。全方位介绍了青龙硬件系统的设计内容,涵盖总体设计、构型设计、功能划分与设计、行走与驱动系统设计、操纵与作业系统设计、能源动力系统设计以及感知与控制系统设计等方面,各部分均详细阐述了设计的关键点与技术细节。此外,文章还对人形机器人直线关节技术进行了探讨,为相关技术研究与应用提供了有价值的参考。
(文末附有PDF下载链接哦~)
1、设计目标与流程
1.1 青龙全尺寸通用人形机器人硬件平台设计目标
有观点认为硬件平台决定产品的瓶颈,原因在于所有创新点、算法、软件都需依托硬件平台实现。若硬件平台无法支撑,再新颖的想法、再高端的控制算法也难以落地。比如汽车领域,拖拉机绝不可能实现百公里加速二点几秒及卓越的操控,其他产品同理。因此,在人形机器人这一新兴领域,硬件平台设计是至关重要的基础,它直接关系到产品能否成功落地及落地后的效果。
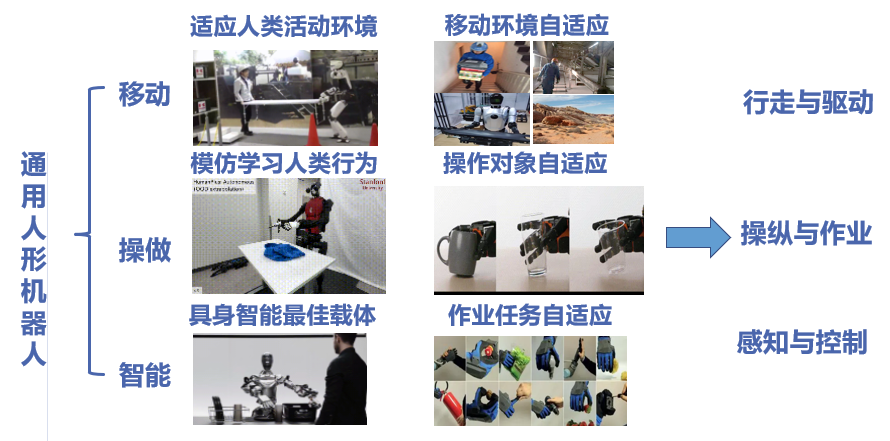
在青龙设计初期,首先要明确产品目标:要打造怎样的人形机器人?构建何种平台?具体实现哪些功能?以青龙为例,其旨在打造一款强对标人类的通用人形机器人平台,需实现以下功能:一是自适应环境,进行移动行走,如简单行走、避障等;二是能简单完成操作功能,像模仿人类学习抓取、折叠等;三是作为智能硬件平台载体,搭载AI等技术。
1.2 青龙闭环设计流程
在确定好设计目标后,将依据以下六个步骤开展青龙的闭环设计,这也是众多成功产品所遵循的主要设计流程。
一、需求分析。具体分析包括明确应用场景(如服务、工业、教育、研究等用途);需实现的性能目标(如自由度、步态速度、续航时间、负载能力、交互能力等)以及需适应的环境(如室内、室外、地面的情况等)。
二、概念设计。明确功能划分,确定机械结构(头部、躯干、四肢等)和关键模块(传感器、驱动系统、控制器等);并进行形态设计,初步确定机器人的外形,考虑尺寸、比例和外观设计等。此外,还需要对技术指标进行可行性分析,评估最初设定的目标是否可行。
三、硬件架构设计。涵盖详细的机械设计(包括关节选型、材料选型以及动力学、静力学分析等),驱动系统设计,传感器选型,控制系统设计以及电源系统设计,这一步主要是搭建和设计整体硬件架构。
四、虚拟仿真与验证。在虚拟环境下进行仿真验证,包括动力学仿真和控制算法仿真,并据此进行结构优化。
五、样机制造。搭建和装配原型样机,进行关键零件测试(如关键模组、单臂、单腿等)以及系统集成。
六、集成调试与优化。调试硬件模块,确保机械结构、驱动系统、传感器、控制器正常工作。测试底层控制程序、运动规划和交互算法。验证基本功能,如步态稳定性、运动灵活性、环境适应性。在实际任务场景中测试机器人表现,包括负载测试和连续运行稳定性。根据测试反馈调整结构设计和算法参数。改进模块化设计,提升维护性和扩展性。在保证性能的基础上优化生产成本,为批量生产做准备。
2、“青龙”硬件系统设计内容
2.1 青龙全尺寸通用人形机器人硬件系统总体设计
要打造高度对标人类的全尺寸机器人,需对人体各节点进行分析,深入研究人的运动方式、关节组成以及各关节的自由度情况,以此为后续整体结构设计提供理论支撑。
基于上述六步流程,青龙机器人的硬件总体设计构建了人-机融合仿生映射机器人总体设计体系,采用行为特征提取、机构-尺度综合、功能结构一体化设计等手段,实现了高动态、高承载、强仿生、全尺寸人形机器人研制。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 316
316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









