



 本文介绍了如何使用ROSbag工具来加载bag文件,通过select函数选择特定的消息类型,如'nav_msgs/Odometry',并利用readMessages函数读取数据。在存在同名消息类型时,可以通过指定话题来筛选,例如'/tb3_0/lidar_points',并设置'DataFormat'为'struct'以获取struct形式的数据。
本文介绍了如何使用ROSbag工具来加载bag文件,通过select函数选择特定的消息类型,如'nav_msgs/Odometry',并利用readMessages函数读取数据。在存在同名消息类型时,可以通过指定话题来筛选,例如'/tb3_0/lidar_points',并设置'DataFormat'为'struct'以获取struct形式的数据。
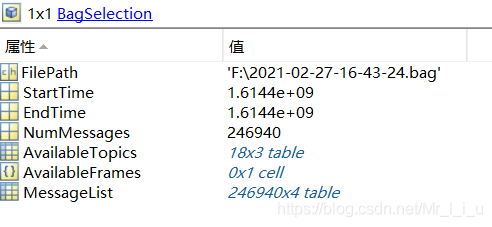
使用 rosbag()函数加载bag文件
bag = rosbag('F:\2021-02-27-16-43-24.bag');
其中 ‘F:\2021-02-27-16-43-24.bag’ 是bag文件的存放位置。加载后的结果为:
使用select()函数选择需要的消息类型
msgs = select(bag,'MessageType','nav_msgs/Odometry');
使用readMessages() 函数读取数据
data = readMessages(msgs);
当存在同名的消息类型时,可以使用select() 函数先选择话题,再读取数据,其代码如下:
lidarpoint = select(bag,'Topic','/tb3_0/lidar_points');
msgStructs = readMessages(lidarpoint,'DataFormat','struct');
其中 'DataFormat','struct' 表示数据输出为struct形式。

















 692
692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









