



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
💥1 概述
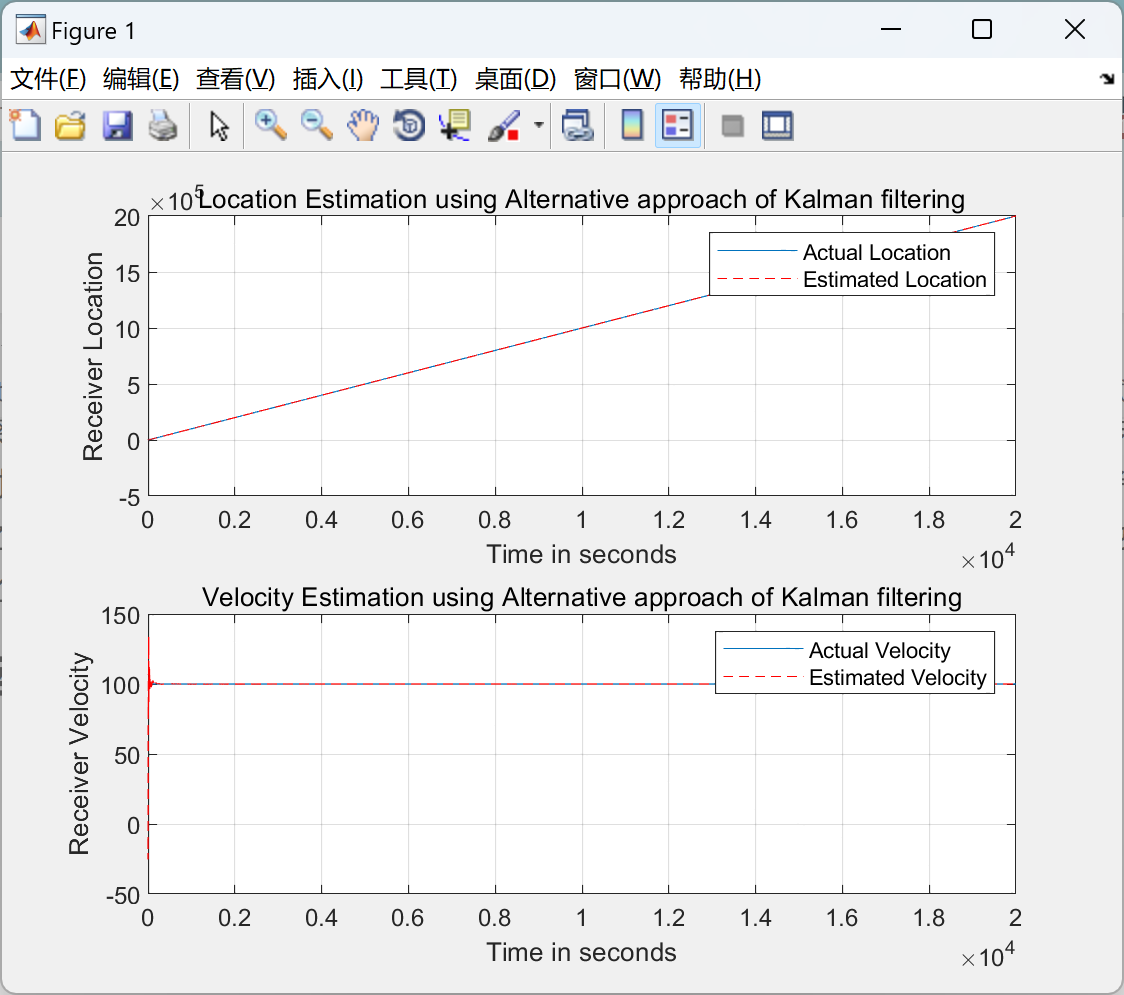
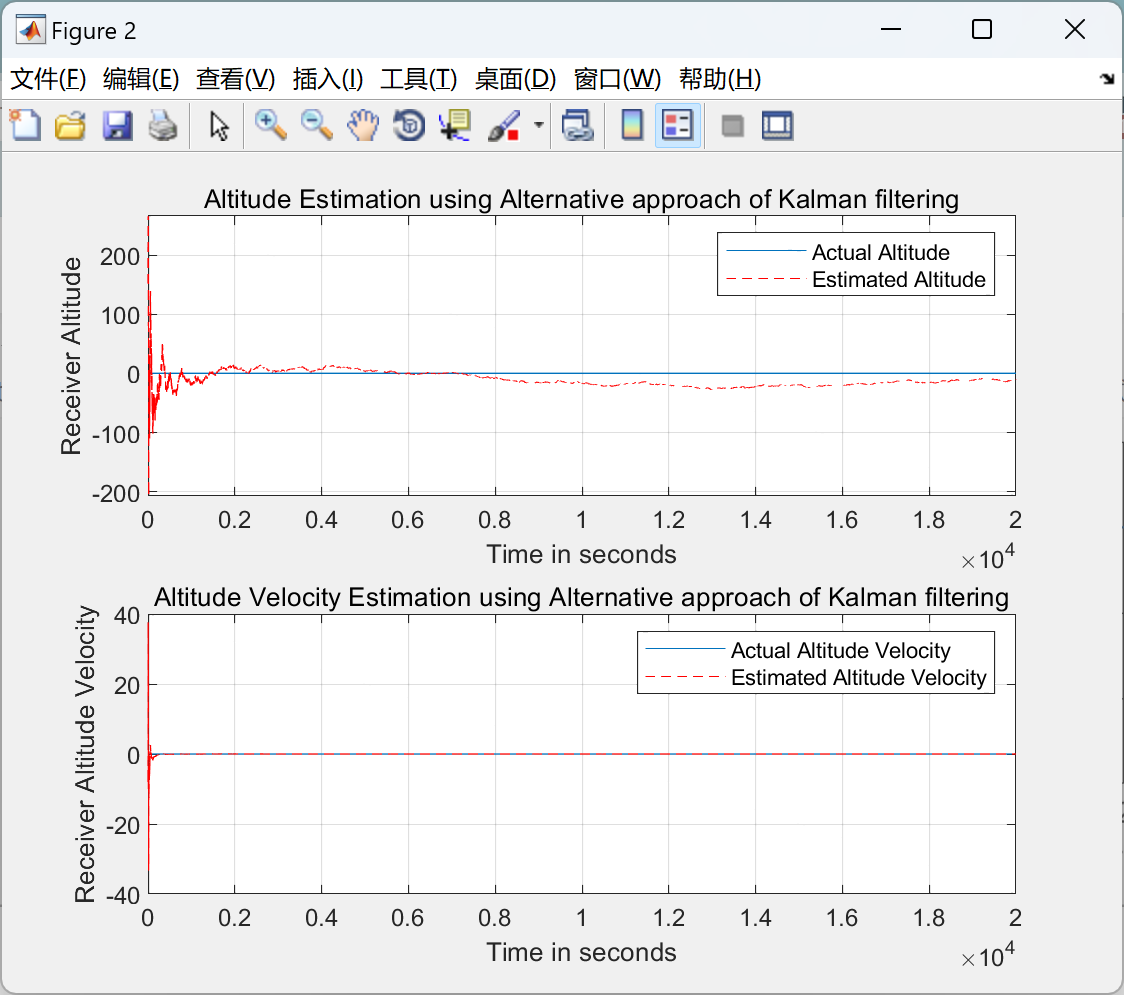
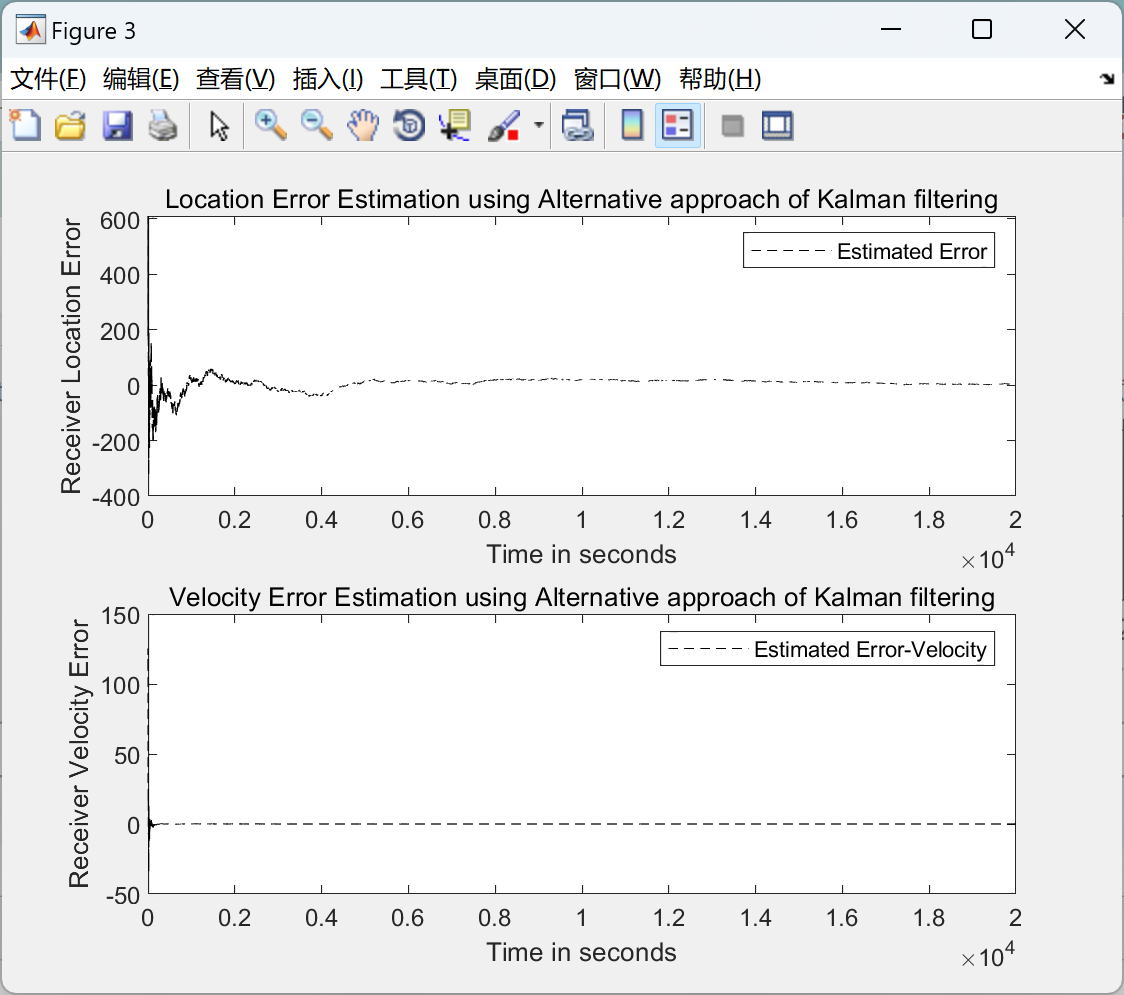
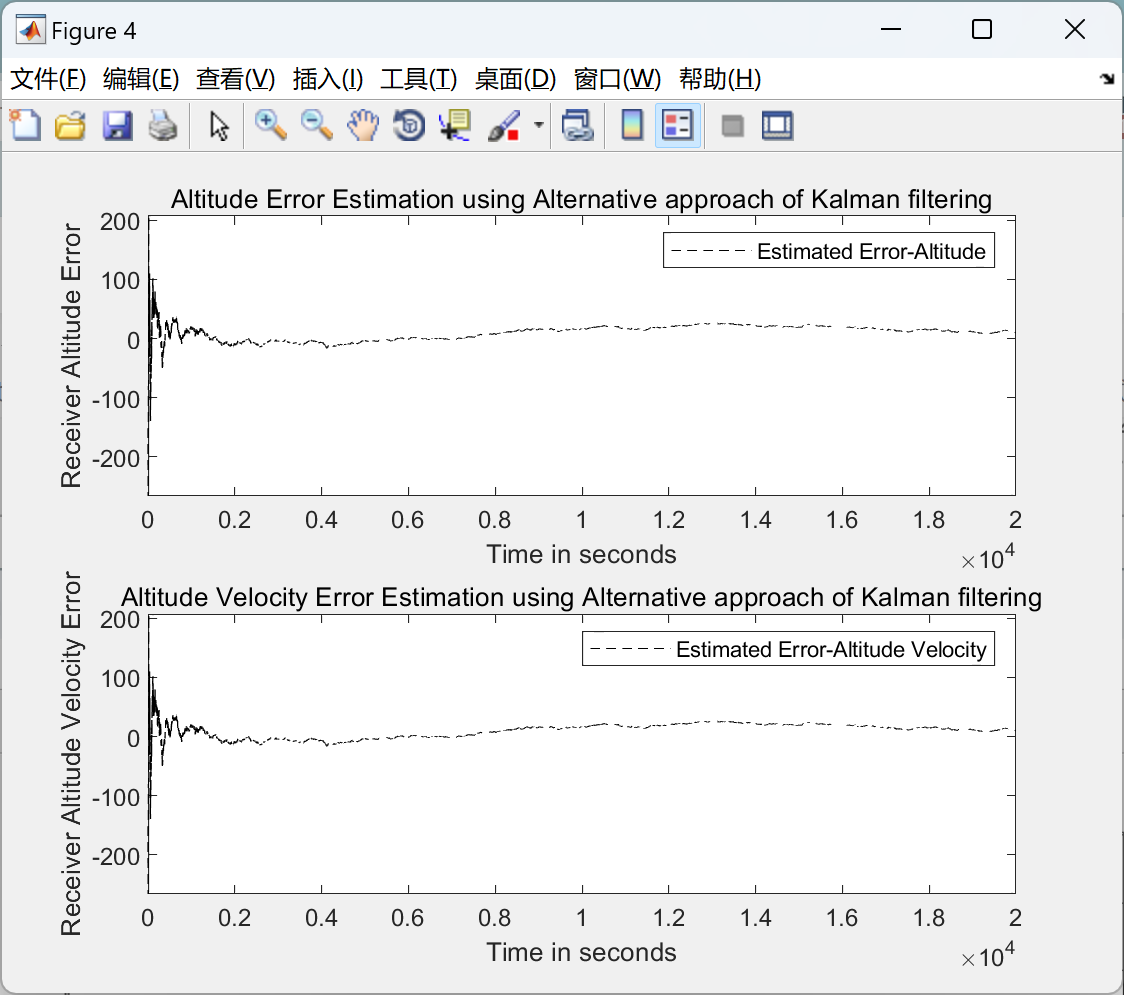
卡尔曼滤波是一种用于估计系统状态的强大技术,特别适用于跟踪移动物体的位置和速度。当跟踪物体时,通常需要考虑噪声和不确定性,而卡尔曼滤波能够有效地处理这些问题。首先,需要建立物体运动的动态系统模型。对于跟踪以恒定速度移动的物体,可以使用简单的线性模型描述其运动。对于跟踪以变化速度移动的物体,可能需要更复杂的非线性模型。确定如何通过传感器测量来观测物体的状态。这通常包括将传感器测量转换为状态向量的测量值,并考虑传感器误差和噪声。 预测步骤:基于系统模型,使用上一个时刻的状态估计来预测下一个时刻的状态。 更新步骤:利用测量值对预测的状态进行修正,以获得更准确的状态估计。在更新步骤中,卡尔曼滤波考虑了预测和测量之间的不确定性,并通过加权平均的方式来融合两者。可以使用卡尔曼滤波有效地跟踪以恒定或变化速度移动的物体,并在存在噪声和不确定性的情况下提供准确的状态估计。
📚2 运行结果
主函数部分代码:
SIGNOISE=300.;
X=0.;
Y=0.;
XH=1000.;
YH=2000.;
XDH=0.;
YDH=0.;
XR1=1000000.;
YR1=20000.*3280.;
XR2=50000000.;
YR2=20000.*3280.;
ORDER=4; TS=1.;
TF=20000.;
PHIS=0.;
T=0.;
S=0.;
H=.01;
PHI=zeros(ORDER,ORDER);
P=zeros(ORDER,ORDER);
IDNP=eye(ORDER);
Q=zeros(ORDER,ORDER);
P(1,1)=1000.^2;
P(2,2)=100.^2;
P(3,3)=2000.^2;
P(4,4)=100.^2;
RMAT(1,1)=SIGNOISE^2;
RMAT(1,2)=0.;
RMAT(2,1)=0.;
RMAT(2,2)=SIGNOISE^2;
TS2=TS*TS;
TS3=TS2*TS;
Q(1,1)=PHIS*TS3/3.;
Q(1,2)=PHIS*TS2/2.;
Q(2,1)=Q(1,2);
Q(2,2)=PHIS*TS;
Q(3,3)=PHIS*TS3/3.;
Q(3,4)=PHIS*TS2/2.;
Q(4,3)=Q(3,4);
Q(4,4)=PHIS*TS;
count=0;
while T<=TF
XR1OLD=XR1;
XR2OLD=XR2;
XOLD=X;
YOLD=Y;
XR1D=-14600.;
XR2D=-14600.;
XD=100.;
YD=0.;
XR1=XR1+H*XR1D;
XR2=XR2+H*XR2D;
X=X+H*XD;
Y=Y+H*YD;
T=T+H;
XR1D=-14600.;
XR2D=-14600.;
XD=100.;
YD=0.;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]刘锡楠,吴盘龙,薄煜明.一种面向纯方位机动目标跟踪的伪线性卡尔曼滤波方法[J/OL].指挥控制与仿真:1-7[2024-05-10].http://kns.cnki.net/kcms/detail/32.1759.TJ.20240130.1727.002.html.
[2]付学瀚,燕贺云,朱立东,等.基于卡尔曼和扩展卡尔曼滤波的耦合载波跟踪方法[J].移动通信,2024,48(01):118-124.

















 339
339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









