



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
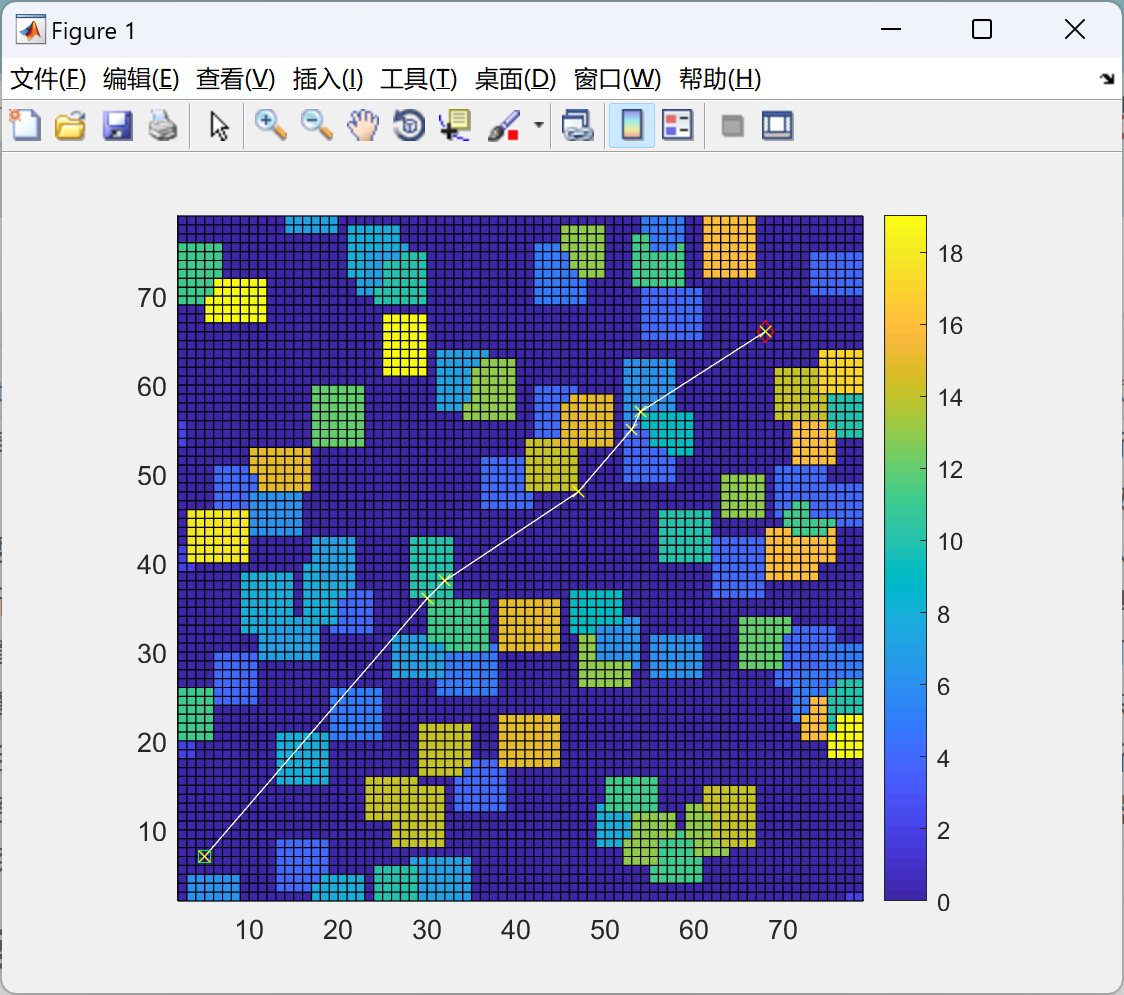
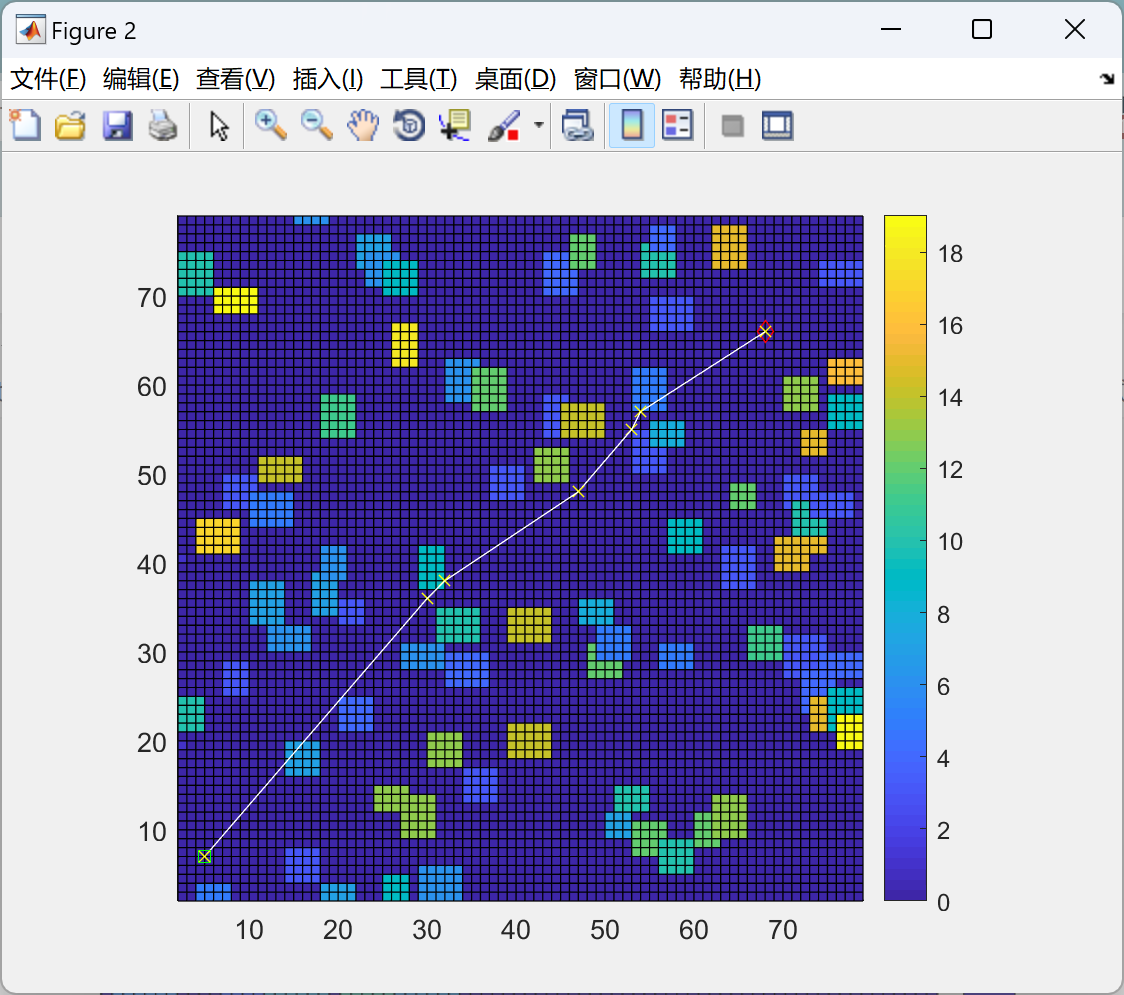
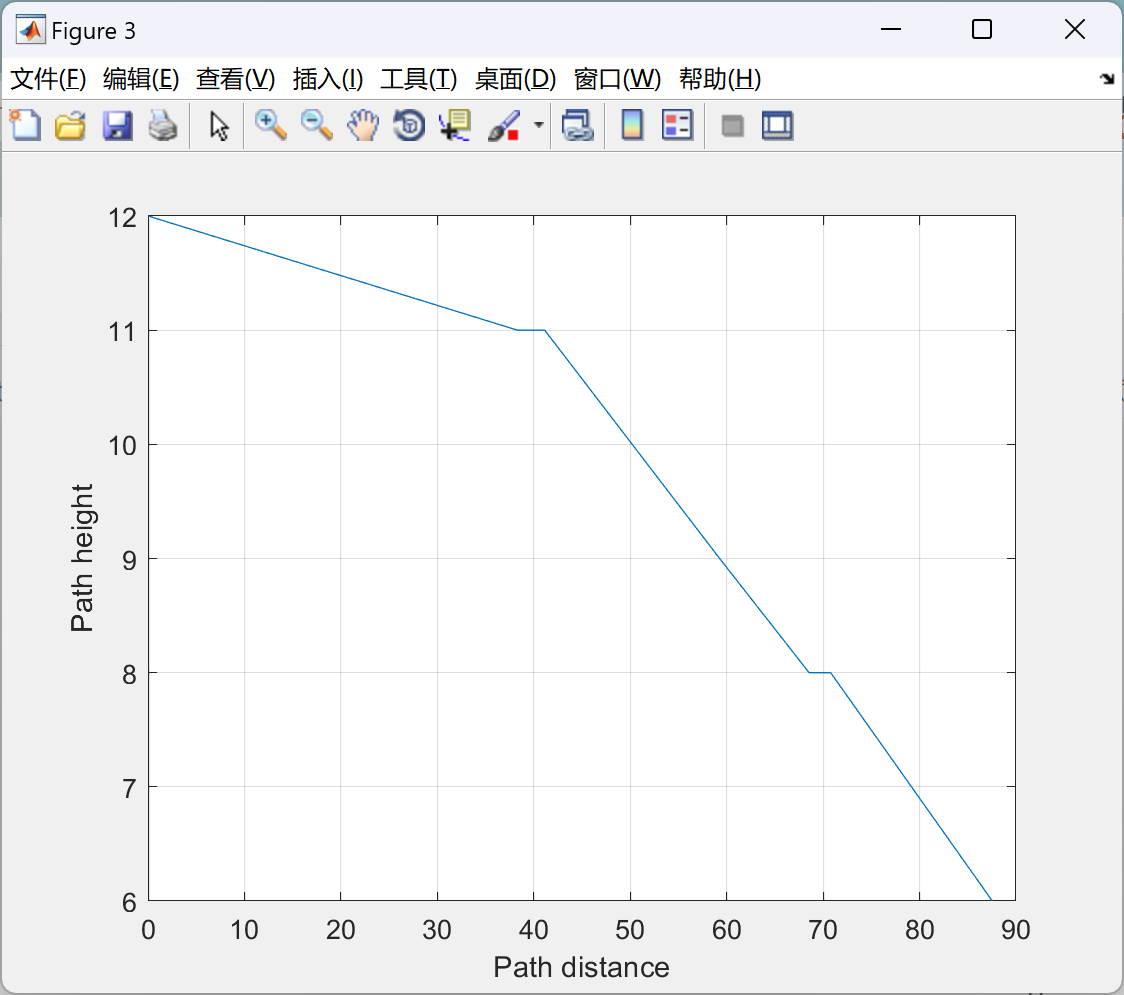
在3D网格地图上进行路径规划是一项重要的任务,特别适用于机器人导航、虚拟现实环境、无人机航行等领域。在3D网格地图中,每个单元格表示一个可行走的区域,而障碍物则占据了一定的单元格。路径规划的目标是找到一条从起点到终点的最优路径,使得路径穿过的单元格数量最少或路径长度最短,同时避开障碍物。根据选择的路径规划算法,在地图上执行路径搜索。从起点开始,不断向周围探索,直到找到终点或确定无法到达终点为止。搜索过程中,需要考虑单元格的通行性和障碍物。一旦找到一条路径,可以对其进行优化以使其更加平滑或更短。例如,可以使用路径平滑算法来减少路径上的拐点,或者使用最短路径算法来进一步缩短路径长度。在动态环境中,地图可能会发生变化,例如障碍物的移动或增加。因此,路径规划系统需要能够实时更新地图和重新计算路径,以适应变化的环境。可以在3D网格地图上成功进行路径规划,从而实现机器人、无人机等移动设备的有效导航和路径跟踪。
📚2 运行结果
主函数部分代码:
%Main
clc
clear
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Grid and path parameters
%Grid size [y,x,z] and resolution
sizeE=[80 80 20];
d_grid=1;
%Starting point
x0=5;
y0=7;
z0=12;
%Arrival point
xend=68;
yend=66;
zend=6;
%Number of points with low elevation around start and end point area
n_low=3;
%A* or Theta* cost weights
kg=1;
kh=1.25;
ke=sqrt((xend-x0)^2+(yend-y0)^2+(zend-z0)^2);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Map definition
%Average flight altitude
h=max(z0,zend);
%Points coordinates in [y,x,z] format
P0=[y0 x0 z0];
Pend=[yend xend zend];
%Generate map
[E,E_safe,E3d,E3d_safe]=grid_3D_safe_zone(sizeE,d_grid,h,P0,Pend,n_low);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Path generation
%Store gains in vector
K=[kg kh ke];
%Measure path computation time
tic
%Generate path (chose one)
% [path,n_points]=a_star_3D(K,E3d_safe,x0,y0,z0,xend,yend,zend,sizeE);
% [path,n_points]=theta_star_3D(K,E3d_safe,x0,y0,z0,xend,yend,zend,sizeE);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]林硕,吴勇鹏,韩忠华,等.多AGV在线任务调配与无冲突路径规划[J/OL].控制工程:1-9[2024-05-10].https://doi.org/10.14107/j.cnki.kzgc.20240053.
[2]王健雄,包菊芳.融合多策略改进的蚁群算法机器人路径规划研究[J/OL].重庆工商大学学报(自然科学版):1-9[2024-05-10].http://kns.cnki.net/kcms/detail/50.1155.N.20240508.1207.004.html.

















 9665
9665

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









