



👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
摘要:
推导了低空无人机与移动站空对地信道分析模型。建议用于频率为(2,1和2.5)GHz的密集城市环境。模型项基于A8G通道光线追踪仿真分析和刀口衍射理论确定。将该模型与其他A2G模型进行比较,显示出更好的标准误差和置信区间验证结果。此外,还讨论了改变频率和无人机高度对路径损耗和视线概率的影响。因此,与光线追踪仿真的共谋相比,所提出的模型提供了一种简单而良好的估计。
原文摘要:
Abstract
A new analytical model of air-to-ground (A2G) channel between a low altitude unmanned aerial vehicle (UAV) and a mobile station is derived. It is proposed for the dense urban environment at frequencies of (1, 2 and 5.8) GHz. The model terms are determined on the basis of ray-tracing simulation analysis for A2G channel and knife-edge diffraction theory. The model is compared with the other A2G model and shows better results of standard error and confidence interval validation. Furthermore, the effects of changing the frequency and UAV height on path loss and probability of line of sight are discussed. Therefore, the proposed model provides a simple and good estimation compared to the complicity of ray-tracing simulation.
当现有地面网络受损或无法完全运行时,无人机(UAV)已成为紧急情况和公共安全情况下的有前途的解决方案。无人机自主操作的能力可用于支持关键任务,如灾害信息融合、损失评估。此外,无人机通信网络可以通过部署搜索和救援任务来拯救人员。无人机和无线传感器网络之间的集成网络结构可以支持大量应用,包括农业和害虫防治、现场检查和调查。此外,无人机可用于包裹递送和航拍[1,2]。此外,无人机被认为是5G的重要组成部分。它们将用于增强通信网络的覆盖范围和速率性能。
此类应用需要高效的部署模型来建立无人机和地面站之间的通信。为了有效部署无人机,无线电波传播信道的建模至关重要。因此,需要估计无人机的数量和计算覆盖一定区域的功耗。
空对地(A2G)信道建模方法通常可分为随机模型和确定性模型。[3-3] 中提出了基于三维几何的无人机-MIMO信道随机模型。确定性信道模型已在 [7-8] 中提出。[10]中提出了一个统计模型,通过三维光线追踪仿真得到路径损失和阴影统计的平均值作为仰角和空中高度的函数。然而,该模型基于单一的模型城市,不能在不同类型的城市环境中广泛推广。[8]中提出了一种低空平台通用统计模型,通过3、9和3 MHz的三维光线追踪估计信道模型参数。[700] 中的模型提出了视线概率表达式,并使用 [2000] 中的结果计算路径损失。
因此,本文的贡献在于几个方面:
- 提出了无人机(发射机)与终端用户(接收机)链路的解析传播模型。
- 该模型基于光线追踪仿真结果和刀刃衍射理论的分析。
- 它表示为无人机高度和仰角的函数。
- 与其他模型相比,该模型[8-10]显示出更好的标准误差和置信区间(CI)验证结果。
- 基于所提出的模型,讨论了改变频率和无人机高度对路径损耗和视线概率(PLOS)的影响。
纸张的结构形成如下。第 2 节介绍了通用密集城市的光线追踪模拟。仿真结果和分析在第 3 节中详细说明。第4节介绍了所提出的模型的数学推导。此外,第5节介绍了对拟议模型的讨论。最后,结论意见在第6节中突出显示。
使用无线InSite程序[3]执行11D光线追踪模拟。它通过从发射器发射光线并在定义的环境中传播它们来进行计算。因此,这些光线与环境特征相互作用并进入接收器。除此之外,相互作用还包括透射、反射和衍射。无线 InSite 的工作频率范围为 ∼50 MHz 至 40 GHz。 仿真输出包括路径损耗、延迟、延迟扩展、到达方向和脉冲响应。
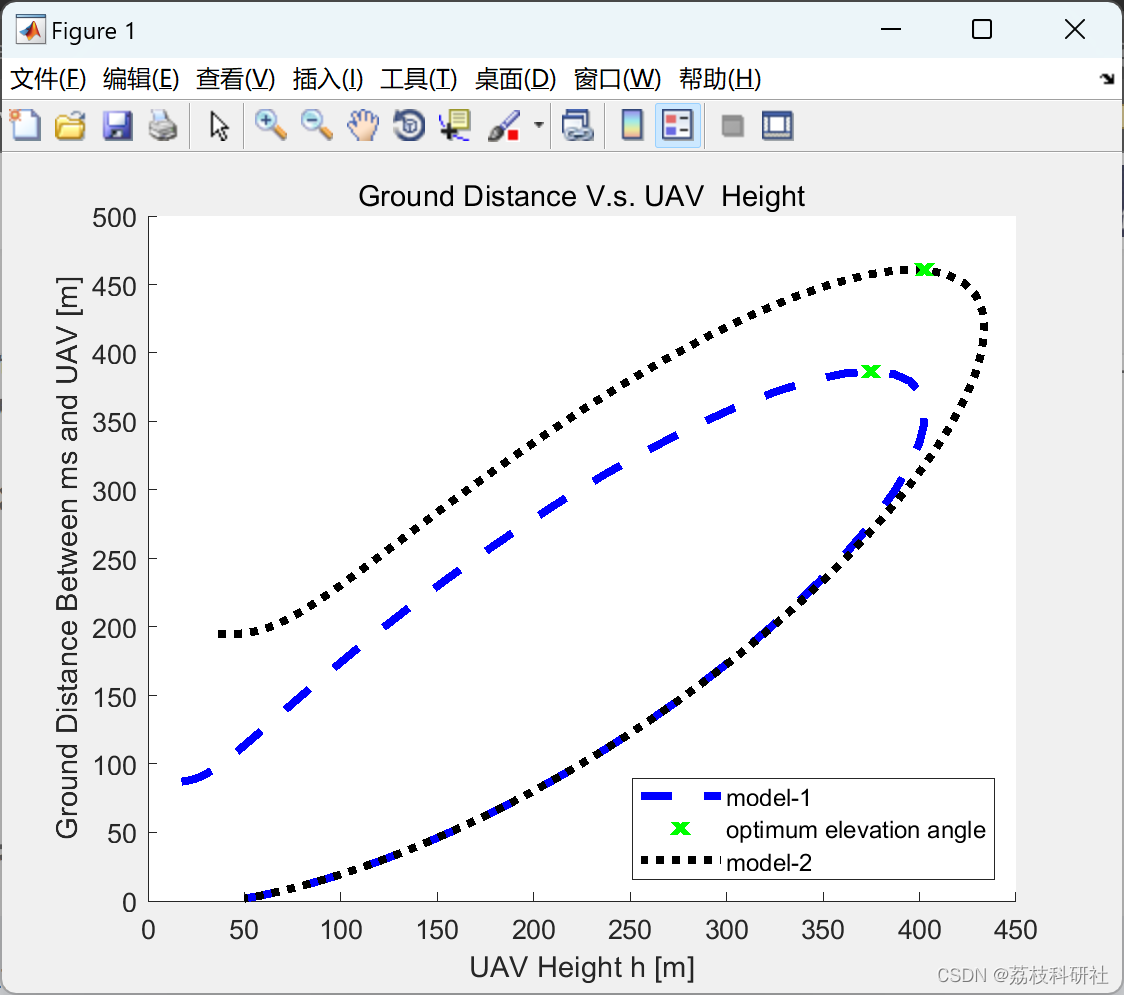
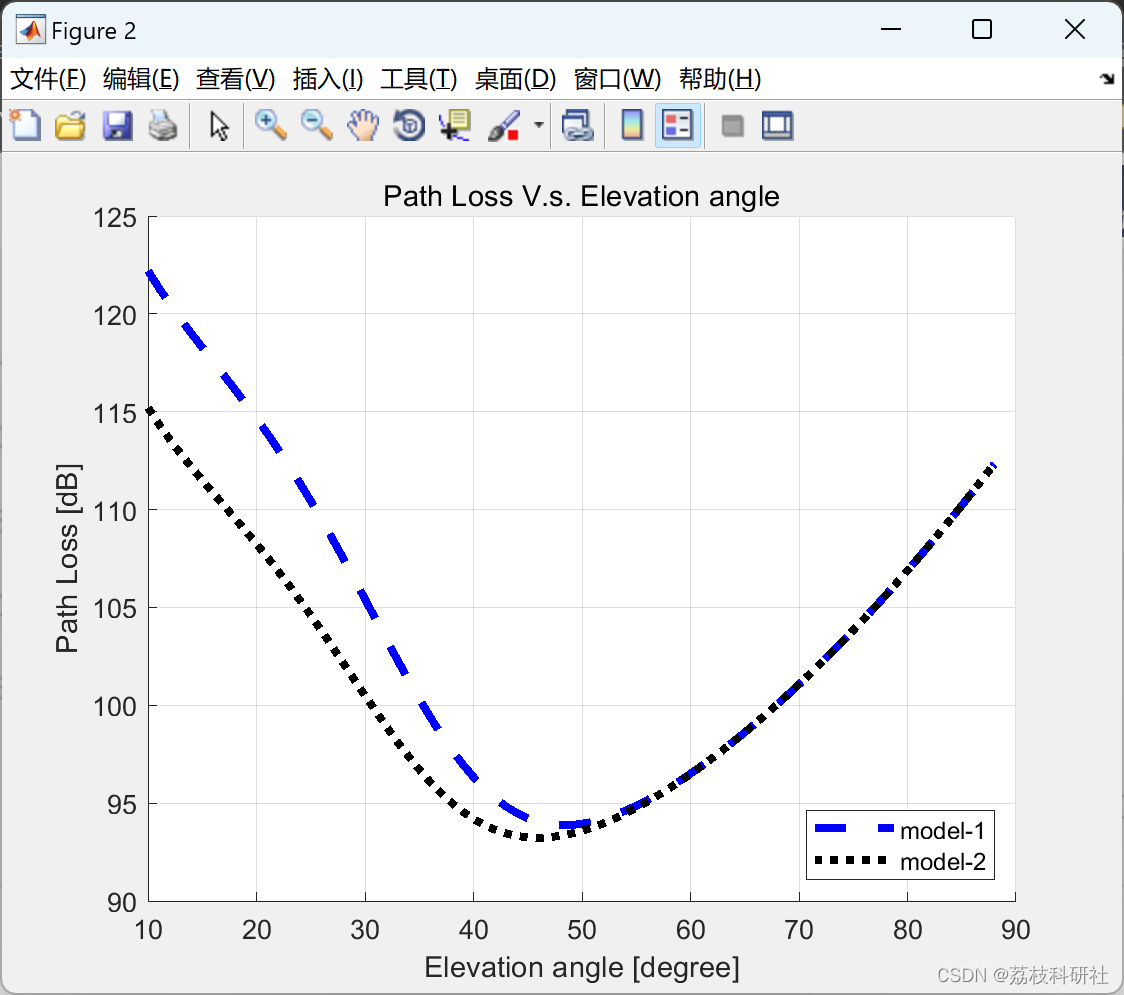
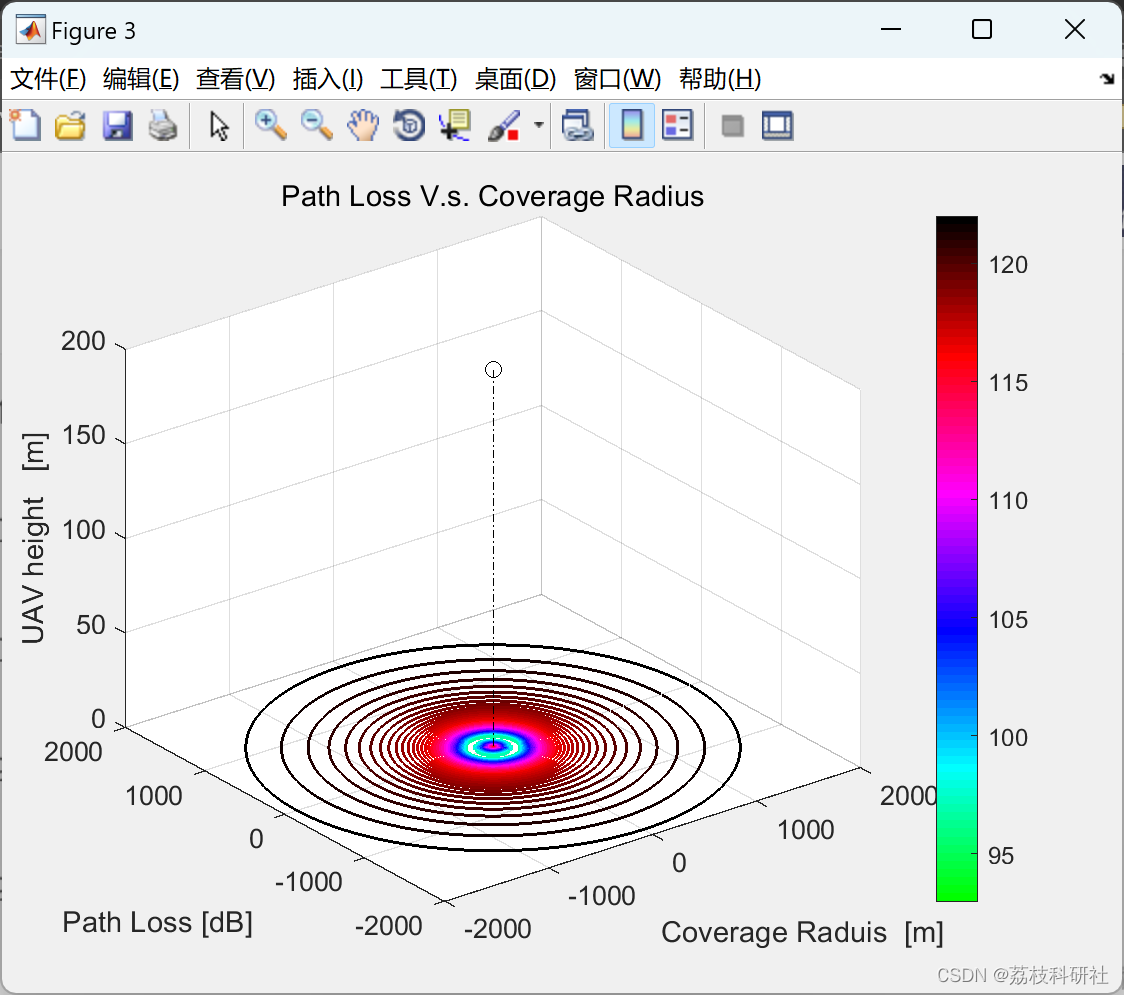
第一个应用在一定的最大允许路径损耗下进行计算,以找到最大覆盖半径的最佳仰角。第二个应用计算特定无人机高度下的路径损耗与仰角的关系。最佳仰角、路径损耗和覆盖半径的UGPL输出被认为是无人机网络部署和规划的重要输入。
以下是关于密集城市环境中无人机空对地(U2G)路径损耗研究的系统性分析:
一、UAV空对地通信(U2G)概述
无人机空对地通信通过低空平台提供灵活覆盖,尤其适用于基础设施受损或超负荷的紧急场景(如灾害救援、体育赛事流量卸载)。其核心优势在于视距(LoS)链路的高可靠性,但密集城市环境中的建筑遮挡和多径效应显著影响信号传播。
关键挑战:
- 能耗与续航:无人机能量有限,需优化部署以平衡覆盖范围与功耗。
- 动态信道特性:城市环境中LoS与非视距(NLoS)链路随机切换,导致路径损耗波动。
- 干扰管理:移动性带来的动态干扰协调难度高于传统蜂窝网络。
二、密集城市环境对无线信号传播的影响
主要影响因素:
- 建筑密度与高度:高层建筑导致衍射损失增加,低层建筑密集区则依赖反射和绕射。
- 材质与穿透损耗:混凝土和金属结构对高频信号(如5.8 GHz)的穿透损耗可达20-30 dB。
- 多径效应:信号通过街道峡谷反射形成多径分量,引起快衰落和码间干扰。
- 阴影效应:建筑物遮挡导致慢衰落,信号强度呈对数正态分布。
典型传播现象:
- 波导效应:沿街道方向的信号增强,垂直方向衰减显著。
- 屋顶衍射主导:在高层建筑区,信号主要通过反射进入街道,而非屋顶绕射。
三、U2G路径损耗建模方法
1. 经典模型:
- 自由空间模型:适用于高空场景(>100 m),假设无遮挡,路径损耗与距离平方成反比,但低估城市环境损耗。
- 双射线模型:考虑直射波与地面反射波叠加,适用于郊区开阔区域。
2. 概率LoS模型:
- 仰角依赖模型:LoS概率随无人机高度和接收端仰角变化,公式为 PLoS=11+aexp(−b(θ−a))PLoS=1+aexp(−b(θ−a))1,其中θ为仰角,a、b为环境参数(如密集城市:a=1.6, b=23)。
- 三状态模型:将信道分为LoS、阴影(NLoS)、阻塞状态,通过半马尔可夫链描述状态转移。
3. 基于机器学习的模型:
- 射线追踪+神经网络:利用光线追踪生成训练数据,通过神经网络预测路径损耗,在2 GHz频段的标准误差可降低至3 dB以下。
- 感知图像融合模型:结合无人机摄像头采集的建筑布局图像,动态预测物理空间到电磁空间的映射关系,适用于6G高频段动态场景。
四、实测数据与模型验证
1. 密集城市实测结果:
- 最佳飞行高度:存在唯一高度使路径损耗最小(如密集城市中约196.96 m),过低时NLoS主导,过高时自由空间损耗增加。
- 频率影响:5.8 GHz频段路径损耗比2 GHz高约15 dB,但波束成形可部分补偿。
- 建筑布局影响:在摩天大楼区域,LoS概率较普通城市降低40%,额外路径损耗增加10-15 dB。
2. 模型对比:
- 光线追踪模型:精度高但计算复杂,适用于离线规划。
- 统计模型(如3GPP TR 38.901) :通过环境分类(郊区/城市/密集城市)简化计算,但在低空UAV场景中需引入高度修正因子。
五、多径效应与阴影衰落的影响
- 快衰落(多径) :城市中多径时延扩展可达1-3 μs,导致符号间干扰,需采用OFDM或均衡技术。
- 慢衰落(阴影) :阴影衰落标准差为4-12 dB,需通过分集接收(如MIMO)或功率控制补偿。
- 动态适应性:无人机可通过实时调整高度或轨迹避开NLoS区域,例如在200 m高度时LoS概率提升至80%。
六、典型城市建筑布局的影响
- 街道布局:网格状街道增强波导效应,而环形布局增加绕射损耗。
- 建筑高度分布:
- 均匀高层建筑:LoS概率随高度指数增长,最佳覆盖半径随高度先增后减。
- 混合高度建筑:低矮建筑群中无人机需提升高度至平均屋顶以上以维持LoS。
- 材料反射系数:玻璃幕墙反射损耗约2 dB,混凝土墙体可达8 dB,影响多径分量强度。
七、挑战与解决方案
- 动态环境建模:采用SLAM技术实时构建3D电磁地图,结合强化学习优化路径。
- 能效优化:基于博弈论或凸优化分配无人机高度与功率,延长续航时间。
- 干扰协调:使用毫米波频段(28/60 GHz)窄波束和动态频谱共享技术。
八、结论
密集城市中U2G路径损耗研究需综合考虑建筑布局、频率选择和无人机动态部署。未来方向包括:
- 智能融合感知与通信:利用AI实现实时信道预测。
- 高频段应用:毫米波与太赫兹频段的传播特性建模。
- 标准化扩展:将3GPP模型扩展至UAV特定场景,推动行业应用。
通过上述多维度的研究,可显著提升无人机在应急通信、智慧城市等场景中的可靠性,为6G空天地一体化网络奠定基础。
📚2 运行结果
部分代码:
%==First app to calculate the coverage raduis vs UAV height and to
%calculate the optimum elevation angle====================================%
%===paramters intial values================================================
path=0;
path3=0;
path4=0;
i=0;
j=0;
ColorSet=varycolor(floor(90))
%=======pathloss input parameters==========================================
%==enviroment type selection===%
env=2;
%=====operating frequency frequency====%
f=1000000000*2;
%==reflection loss===================%
L_r=.3;
%===mobile station height===========%
h_ms=2;
%==Building height===================%
h_B=35;
%=== transmiting power==============%
Ptx=20;
%===received power=================%
Prx=-80;
%====antenna loss=====================%
A=1; %to calculate with, A=0 to calculate without antenna loss==%
%=========max antenna gain=============%
Go=2.15;
%=============antenna 3db bandwidth=======%
seta_3db=76;
%========================call path loss function model1================%
[path,Seta_A2G_opt,R_A2G,h_UAV]=A2G_model1_R_h(env,f,L_r,h_ms,h_B,A,Go,...
seta_3db,Ptx,Prx)
%================%configure plot axes=====================================
fig1=figure;
ax=gca;
hold;
color=1;
%==========================% plot function===============================
draw_R_h(ax,path,R_A2G,h_UAV,color);
%
%===========call the path loss function model2=============================
[path,Seta_A2G_opt,R_A2G,h_UAV]=A2G_model2_R_h(env,f,h_ms,A,Go,...
seta_3db,Ptx,Prx)
%===================%call pot function=======================
color=2;
draw_R_h(ax,path,R_A2G,h_UAV,color);
legend({'model-1','optimum elevation angle','model-2'},...
'Location','southeast')
hold;
%===================save output figure===============================%
saveas(fig1,'../results/A2Gpathloss coverage vs hight.png')
%==========================================================================
%==========================================================================
%==========================================================================
%== second app to calculate the path loss vs elevation angle at certain UAV
%height===================================================================%
% %input param
%UAAV height%
h_UAV=200;
%
%===========call the path loss function model1=============================
path3=A2G_model1_PL_h(env,f,L_r,h_ms,h_B,A,Go,seta_3db,h_UAV);
%================%configure plot axes=====================================
fig2=figure;
hold
ax=gca;
color=1;
grid(ax,'on');
%=============%set the 3d plot resolution================================
seta=85;
scale=1;
%==============%call plot function=====================================
%=======plot path loss vs. elevation angle at certian height===============
draw_PL_h(ax,path3,color);
%===========call the path loss function model2=============================
path4=A2G_model2_PL_h(env,f,h_ms,A,Go,seta_3db,h_UAV);
color=2;
%=======plot path loss vs. elevation angle at certian height===============
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Nour El-Din Safwat , Fatma Newagy , I. M. Hafez (2022) UGPL: A MATLAB tool for UAV-to-Ground path loss calculations

















 658
658

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









