






 本文介绍了如何在初次使用四轴无人机和px4时,检测并修正电机旋转方向错误,包括在Actuators中测试转向、QGC中的电机序号调整以及四合一电调的注意事项。作者分享了使用dshotreverse和dshotsave指令来修改电机转向的方法及恢复默认转向的步骤。
本文介绍了如何在初次使用四轴无人机和px4时,检测并修正电机旋转方向错误,包括在Actuators中测试转向、QGC中的电机序号调整以及四合一电调的注意事项。作者分享了使用dshotreverse和dshotsave指令来修改电机转向的方法及恢复默认转向的步骤。
最近第一次接触四轴无人机和px4,在测试时发现自己装的四轴中,有两个电机的旋转方向错误了,按照土办法是直接给电机两边的两条线更换位置,但在QGC中用指令修改电机的转向会更加方便。
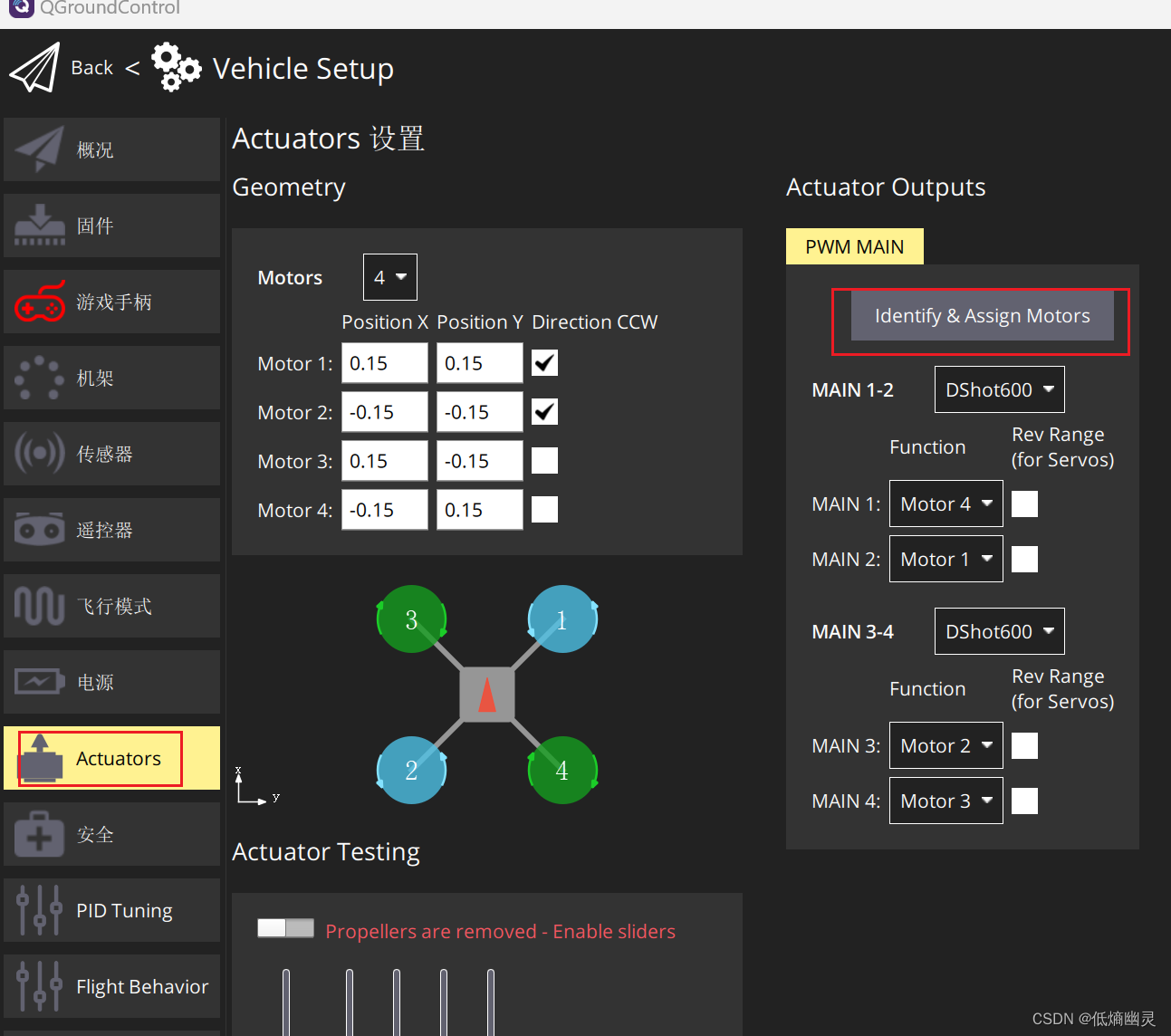
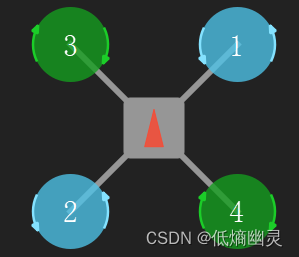
我们来到Actuators这一项,在右边的identify Assign Motors可以测试飞机的转向是否正常,飞机将会依次旋转四个电机,每旋转一个自己就点击相应的序号。(装上螺旋桨在开阔的地方测试,会比较容易看出来旋转方向)
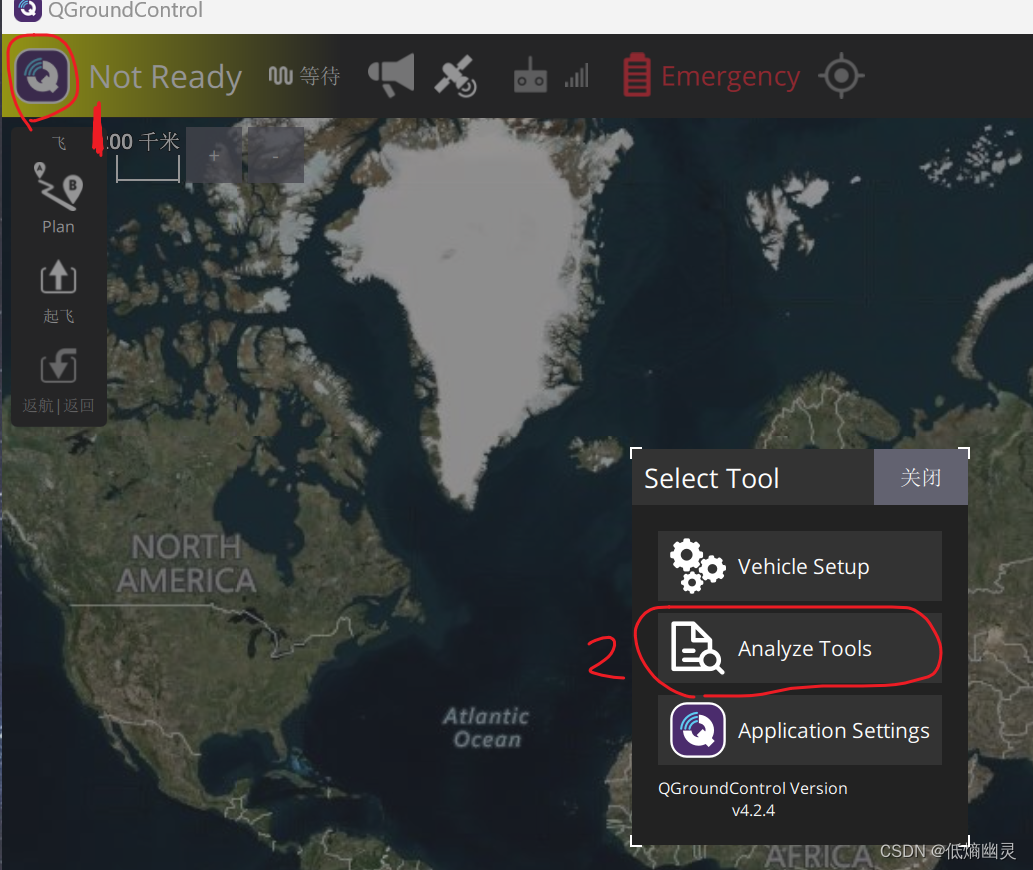
我在测试中得知是电机3和4方向相反,此时来到界面中的分析工具,然后点击Mavlink控制台
在控制台中输入
dshot reverse -m 2
dshot save -m 2后面的2是指电机的序号,根据自己需要修改的去更改相应的序号即可。
这里要注意的是:序号2指的是电调硬件上标识的序号,不是QGC中的序号!
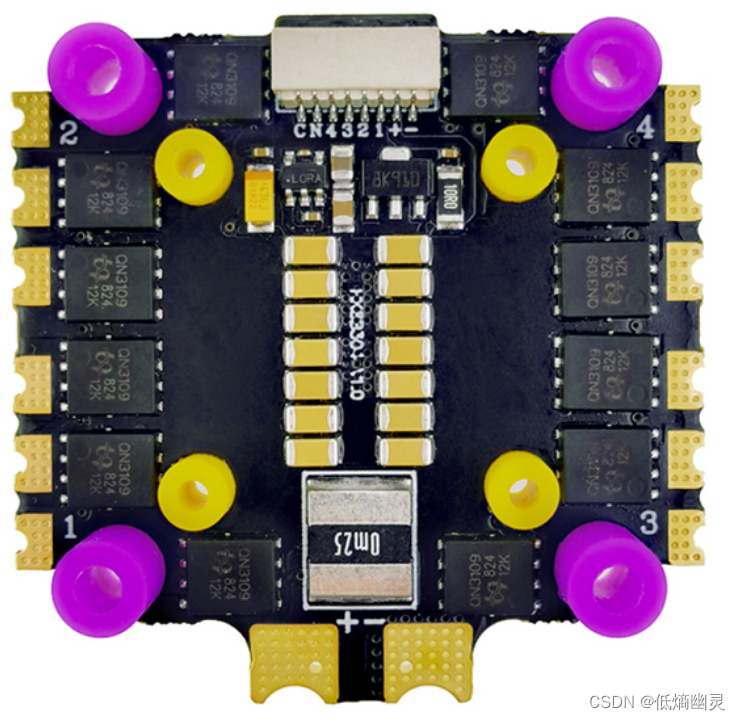
本人购买的是四合一电调,电调上标识的序号和QGC中的序号并不一致,一开始我以为dshot reverse -m 2更改的qgc的电机2,导致一直改不了我想要的电机。
如果不小心改变了原本方向正确的电机,可以通过以下的命令恢复默认转向
dshot normal -m 1
dshot save -m 1(后面的数字依然是 电调硬件上标识的序号)

















 1631
1631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









