







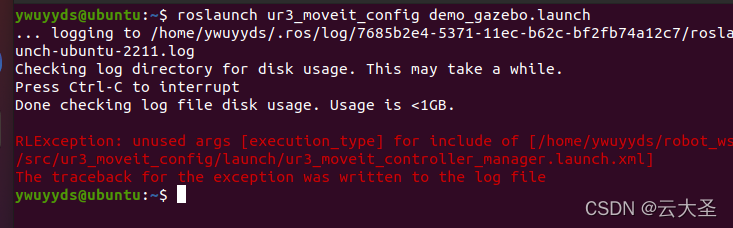
将solidworks里面的文件导出之后我们启动demo_gazebo.launch出现错误
执行指令:roslaunch ur3_moveit_config demo_gazebo.launch
这个时候你需要将导出的配置文件夹当中的下面控制器管理的类型添加起来,如下图
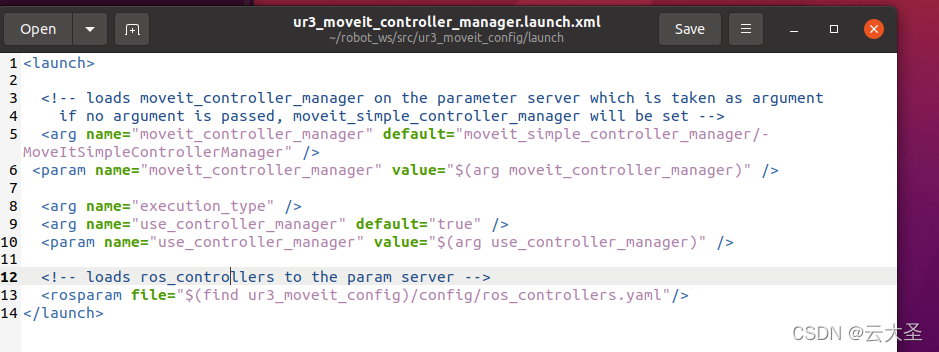
最后你再执行指令就可以,但是这样最后在gazebo显示的模型还是有问题,你会发现都是乱的,这个问题后面再研究!
将solidworks里面的文件导出之后我们启动demo_gazebo.launch出现错误
执行指令:roslaunch ur3_moveit_config demo_gazebo.launch
这个时候你需要将导出的配置文件夹当中的下面控制器管理的类型添加起来,如下图
最后你再执行指令就可以,但是这样最后在gazebo显示的模型还是有问题,你会发现都是乱的,这个问题后面再研究!
 4012
1391
2557
1万+
729
6297
4012
1391
2557
1万+
729
6297

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























