



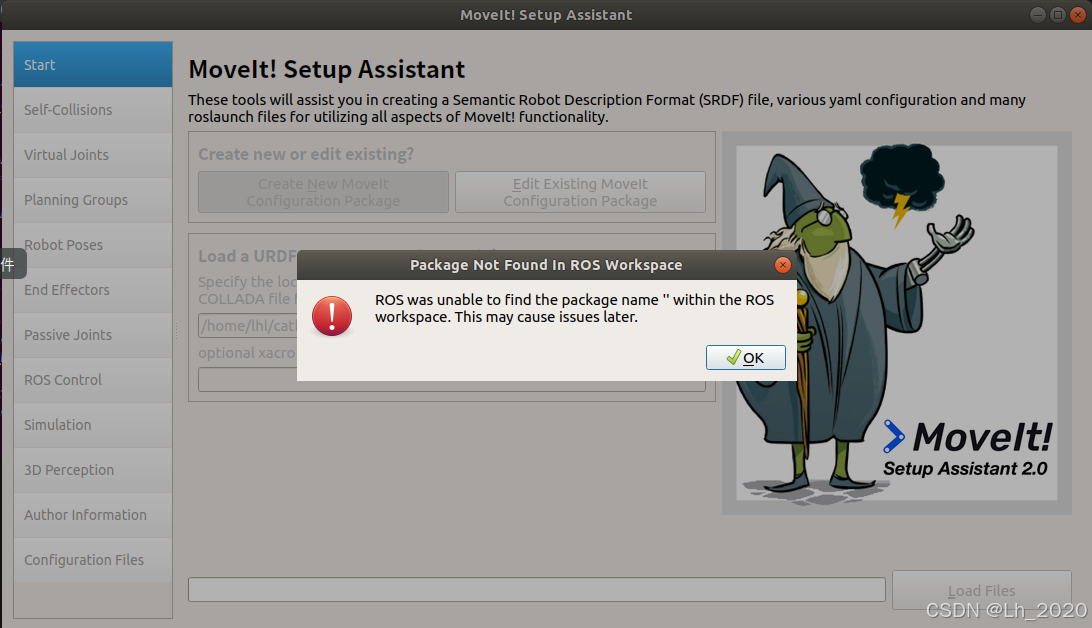
- 问题,导入自己的模型到Movelt中出现ROS was unable to find the package name "within the ROSworkspace.This may cause issueslater错误。
- Movelt提示错误
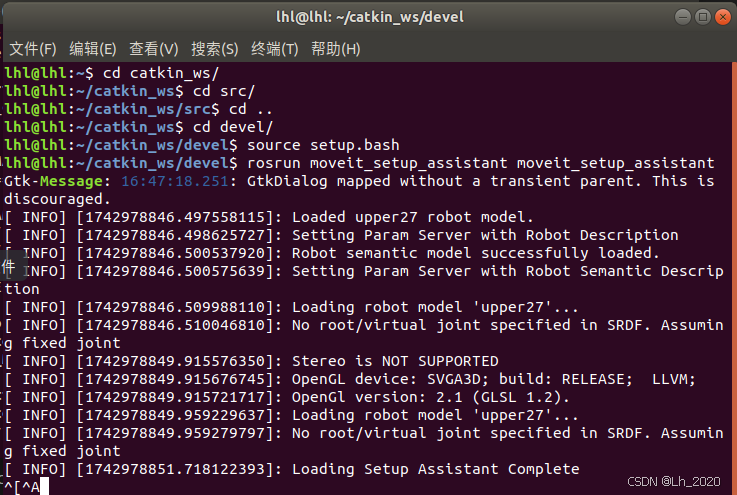
- 解决办法
cd catkin_ws
cd devel
source setup.bash
rosrun moveit_setup_assistant moveit_setup_assistant- 终端输入步骤
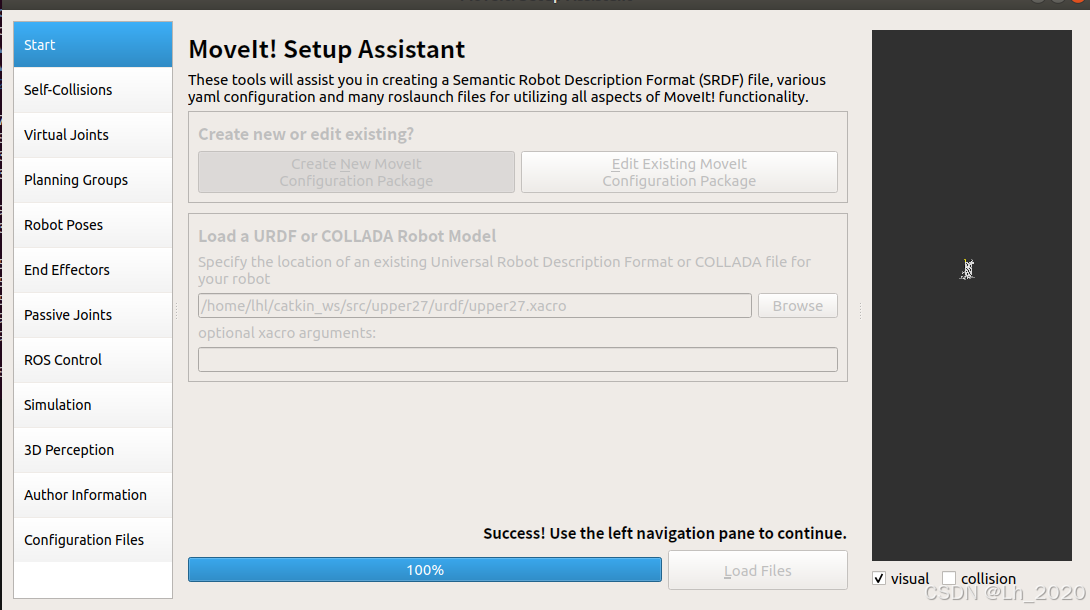
- 成功解决
参考:
cd catkin_ws
cd devel
source setup.bash
rosrun moveit_setup_assistant moveit_setup_assistant
参考:
 3万+
745
3238
1万+
9753
1336
3万+
745
3238
1万+
9753
1336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























