



第一步:
cd到希望创建功能包的文件夹下,输入代码
ros2 pkg create --build-type ament_python --license Apache-2.0 demo_python_pkg
解释:ros2 pkg create是固定的,后面两个带 -- 的都是功能包的属性,比如第一个 --build-type ament_python 的含义就是创建一个Python的功能包,第二个 --license Apache-2.0 的含义是功能包的许可证是 apache 的。此外还有几个属性,可以通过下面这行代码查询。
demo_python_pkg是功能包的名称。
ros2 pkg create --help
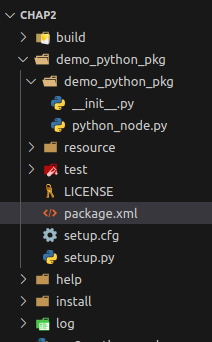
创建完成后,出现下列文件夹:
第二步:
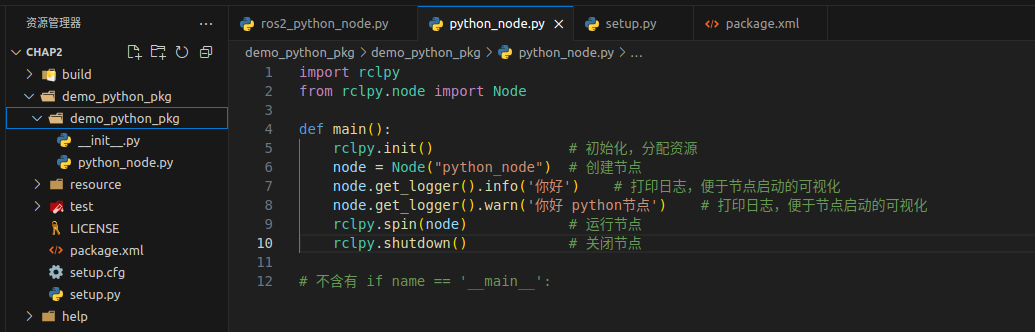
在第二级demo_python_pkg下创建你想要执行的文件,我这里是:
第三步:
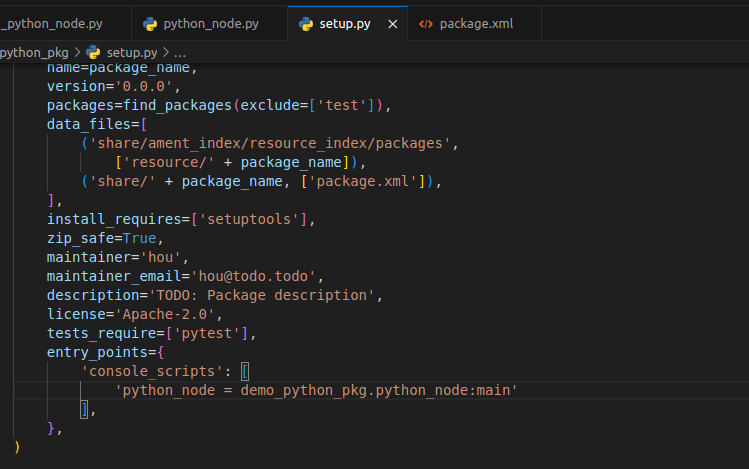
修改setup.py文件,修改entry_point,让ros知道该从哪里进入程序。
第四步:
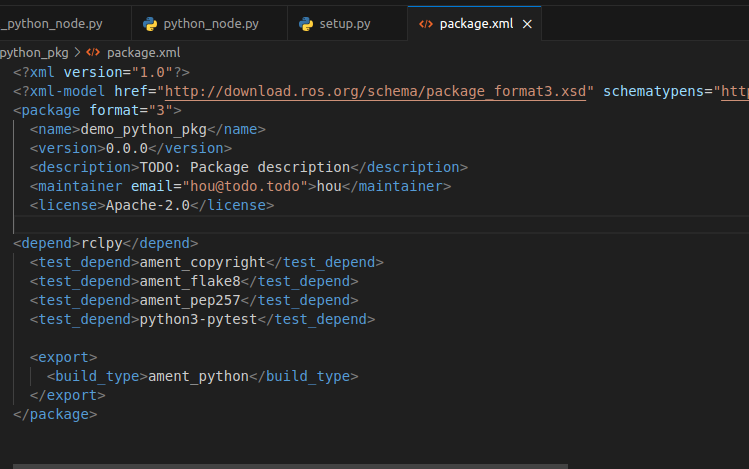
修改package.xml文件,加入:
<depend>rclpy</depend>
第五步:
cd 到功能包上级文件夹,编译功能包。
colcon build
结果:产生其他几个文件夹和一个日志 :

















 3122
3122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









