







 本文介绍如何在ROS环境中创建一个键盘控制的小车控制包,包括使用catkin工作空间创建控制包、编写源码实现键盘控制功能的具体步骤。
本文介绍如何在ROS环境中创建一个键盘控制的小车控制包,包括使用catkin工作空间创建控制包、编写源码实现键盘控制功能的具体步骤。
之前有小伙伴问过LZ,如何移动仿真的小车呢?有一个方法是直接在终端中输入message,还有可以通过键盘控制小车.
1.创建控制包
在ROS中有两个工作空间方式,一个是使用catkin,另一个是rosbuild.
使用rosbuild将ROS程序安装到其他系统或架构上是很麻烦的,这是rosbuild存在的主要问题,也是后来为何要开发catkin的原因。
而为了解决上面这个问题,提高可移植性的关键是为ROS包提供安装目标,并服从FHS的安装布局。如果仅改变rosbuild并不是说不可能实现,但这实现似乎很难。
所以,catkin主要的设计过程是为CMake宏、变量和python写帮助函数catkin的设计者们也就此试图改进catkin的使用体验,以减少在程序构建时多依赖的项目对cmake和rosbuild的使用。 而解决这些问题的动机在于,rosbuild缓慢的构建速度是被人们抱怨最多的地方。
参考地址:https://blog.youkuaiyun.com/chishuideyu/article/details/53581013
LZ工作空间使用的是catkin,如果使用rosbuild方式可以参考https://www.ncnynl.com/archives/201609/846.html
首先,我们为键盘控制单独建立一个包:
cd ~/catkin_ws/src
catkin_create_pkg smartcar_teleop rospy geometry_msgs std_msgs roscpp
cd ~/catkin_ws
catkin_make2.编写源码
LZ也是新手,就加了点注释,键盘控制.
#include <termios.h>
#include <signal.h>
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/poll.h>
#include <boost/thread/thread.hpp>
// ros/ros.h是一个实用的头文件,它引用了ROS系统中大部分常用的头文件
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#define KEYCODE_W 0x77
#define KEYCODE_A 0x61
#define KEYCODE_S 0x73
#define KEYCODE_D 0x64
#define KEYCODE_A_CAP 0x41
#define KEYCODE_D_CAP 0x44
#define KEYCODE_S_CAP 0x53
#define KEYCODE_W_CAP 0x57
class SmartCarKeyboardTeleopNode {
private:
double walk_vel_;
double run_vel_;
double yaw_rate_;
double yaw_rate_run_;
geometry_msgs::Twist cmdvel_;
//为这个进程的节点创建一个句柄,第一个创建的NodeHandle会为节点进行初始化,
//最后一个销毁的 NodeHandle 则会释放该节点所占用的所有资源
ros::NodeHandle n_;
//初始化发布节点
ros::Publisher pub_;
public:
SmartCarKeyboardTeleopNode() {
//告诉master我们将要在cmd_vel(话题名)上发布geometry_msgs/Twist消息类型的消息
//这样master就会告诉所有订阅了cmd_vel话题的节点,将要有数据发布.
//第二个参数是发布序列的大小,如果我们发布消息的频率太高,
//缓冲区中的消息在大于1000个的时候就会开始丢弃先前发布的消息
//NodeHandle::advertise() 返回一个 ros::Publisher 对象,它有两个作用:
//1) 它有一个 publish() 成员函数可以让你在topic上发布消息;
//2) 如果消息类型不对,它会拒绝发布。
pub_ = n_.advertise<geometry_msgs::Twist>("cmd_vel", 1);
ros::NodeHandle n_private("~");
n_private.param("walk_vel", walk_vel_, 0.5);
n_private.param("run_vel", run_vel_, 1.0);
n_private.param("yaw_rate", yaw_rate_, 1.0);
n_private.param("yaw_rate_run", yaw_rate_run_, 1.5);
}
~SmartCarKeyboardTeleopNode() {}
void keyboardLoop();
void stopRobot() {
cmdvel_.linear.x = 0.0;
cmdvel_.angular.z = 0.0;
pub_.publish(cmdvel_);
}
};
SmartCarKeyboardTeleopNode *tbk;
int kfd = 0;
struct termios cooked, raw;
bool done;
int main(int argc, char **argv) {
//初始化ROS.它允许允许ROS通过命令进行名称重映射.
//我们可以指定节点的名称,但是这里的名称必须是basename,名称内不能包含/等符号
ros::init(argc, argv, "tbk", ros::init_options::AnonymousName | ros::init_options::NoSigintHandler);
SmartCarKeyboardTeleopNode tbk;
//重新定义一个线程
boost::thread t = boost::thread(boost::bind(&SmartCarKeyboardTeleopNode::keyboardLoop, &tbk));
//ros::spin()在调用后不会再返回,也就是你的主程序到这儿就不往下执行了,
//而ros::spinOnce()后者在调用后还可以继续执行之后的程序。
ros::spin();
//中断线程
t.interrupt();
//由于线程中断,所以立即返回
t.join();
//速度置零
tbk.stopRobot();
tcsetattr(kfd, TCSANOW, &cooked);
return (0);
}
void SmartCarKeyboardTeleopNode::keyboardLoop() {
char c;
double max_tv = walk_vel_;
double max_rv = yaw_rate_;
bool dirty = false;
int speed = 0;
int turn = 0;
// get the console in raw mode
tcgetattr(kfd, &cooked);
memcpy(&raw, &cooked, sizeof(struct termios));
raw.c_lflag &= ~(ICANON | ECHO);
raw.c_cc[VEOL] = 1;
raw.c_cc[VEOF] = 2;
tcsetattr(kfd, TCSANOW, &raw);
puts("Reading from keyboard");
puts("Use WASD keys to control the robot");
puts("Press Shift to move faster");
struct pollfd ufd;
ufd.fd = kfd;
ufd.events = POLLIN;
for (;;) {
boost::this_thread::interruption_point();
// get the next event from the keyboard
int num;
if ((num = poll(&ufd, 1, 250)) < 0) {
perror("poll():");
return;
} else if (num > 0) {
if (read(kfd, &c, 1) < 0) {
perror("read():");
return;
}
} else {
if (dirty == true) {
stopRobot();
dirty = false;
}
continue;
}
switch (c) {
case KEYCODE_W:
max_tv = walk_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S:
max_tv = walk_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A:
max_rv = yaw_rate_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D:
max_rv = yaw_rate_;
speed = 0;
turn = -1;
dirty = true;
break;
case KEYCODE_W_CAP:
max_tv = run_vel_;
speed = 1;
turn = 0;
dirty = true;
break;
case KEYCODE_S_CAP:
max_tv = run_vel_;
speed = -1;
turn = 0;
dirty = true;
break;
case KEYCODE_A_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = 1;
dirty = true;
break;
case KEYCODE_D_CAP:
max_rv = yaw_rate_run_;
speed = 0;
turn = -1;
dirty = true;
break;
default:
max_tv = walk_vel_;
max_rv = yaw_rate_;
speed = 0;
turn = 0;
dirty = false;
}
cmdvel_.linear.x = speed * max_tv;
cmdvel_.angular.z = turn * max_rv;
pub_.publish(cmdvel_);
}
}
在CMakeLists.txt中加上对应代码:
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
add_executable(smartcar_teleop src/teleop.cpp)
target_link_libraries(smartcar_teleop
${catkin_LIBRARIES}
)catkin_make之后,别忘了
source devel/setup.bash按照ROS(六)先打开仿真小车
. devel/setup.bash
roslaunch smartcar_description smartcar_display.rviz.launch
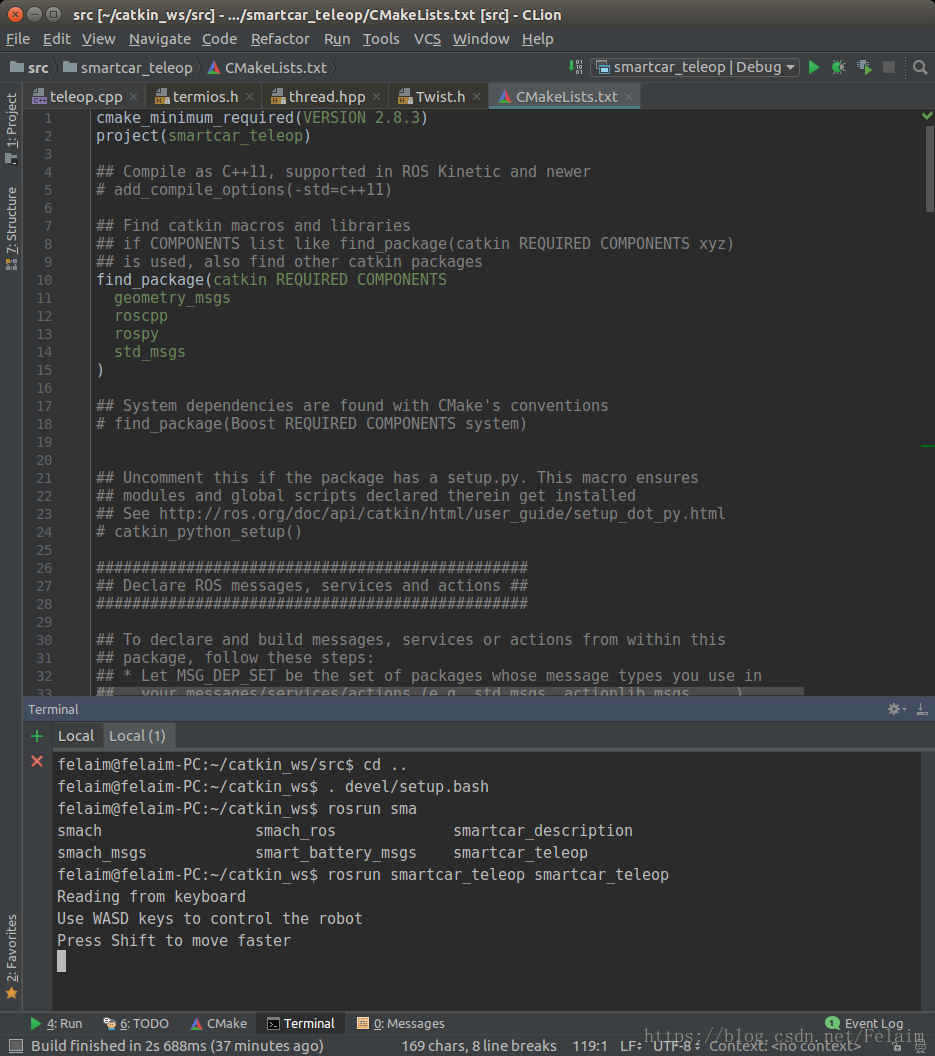
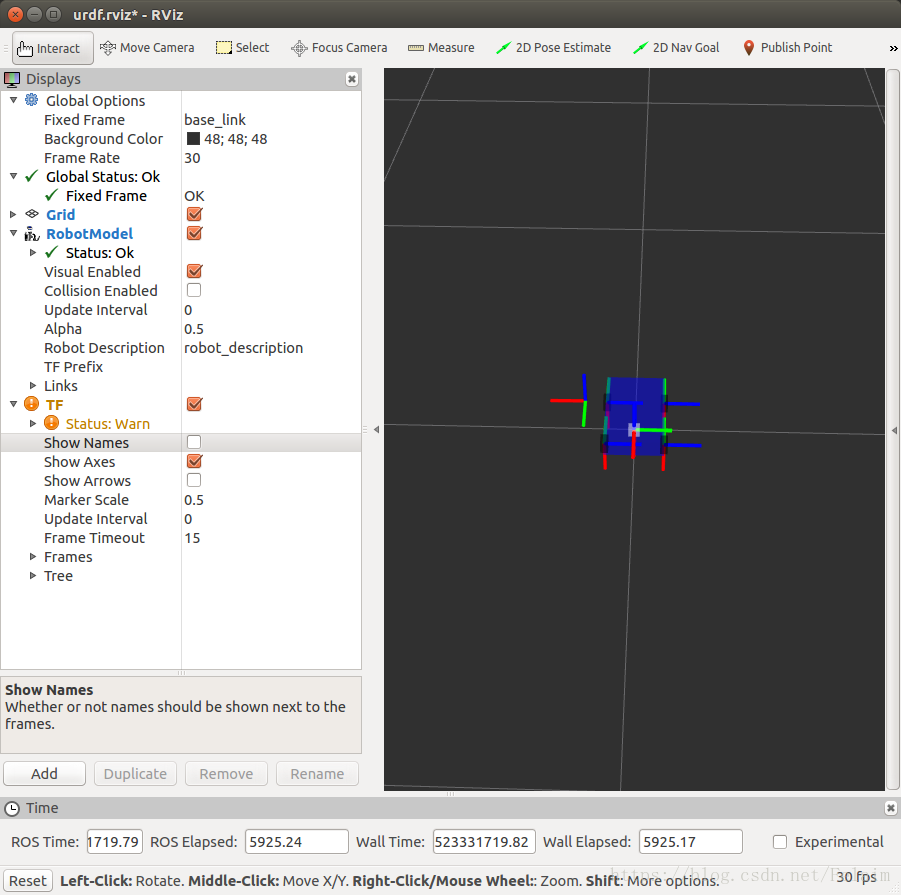
在终端中就可以控制仿真的小车根据键盘的控制进行移动...
实验室就LZ一个人倒腾小车,伤不起呀\(^o^)/~

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









