







数学建模学习-卡尔曼滤波(Kalman Filter)教程(18)
写在最前
注意本文的相关代码及例子为同学们提供参考,借鉴相关结构,在这里举一些通俗易懂的例子,方便同学们根据实际情况修改代码,很多同学私信反映能否添加一些可视化,这里每篇教程都尽可能增加一些可视化方便同学理解,但具体使用时,同学们要根据实际情况选择是否在论文中添加可视化图片。
系列教程计划持续更新,同学们可以免费订阅专栏,内容充足后专栏可能付费,提前订阅的同学可以免费阅读,同时相关代码获取可以关注博主评论或私信。
目录
算法简介
卡尔曼滤波(Kalman Filter)是一种递归的状态估计算法,由Rudolf E. Kálmán于1960年提出。它能够从包含噪声的观测数据中估计动态系统的状态。卡尔曼滤波器通过将预测步骤和更新步骤结合,实现了对系统状态的最优估计。
该算法在工程领域有着广泛的应用,从导航系统到机器人定位,从金融市场预测到信号处理,都能看到卡尔曼滤波的身影。它的核心思想是:通过对系统的数学模型和测量数据的综合利用,得到对系统状态的最优估计。
算法特点
-
递归性:
- 不需要存储所有历史数据
- 只需要上一时刻的状态估计和当前的观测值
- 计算效率高,适合实时处理
-
最优性:
- 在高斯噪声假设下,提供最小均方误差估计
- 对线性系统,是最优的状态估计器
- 估计结果包含不确定性的量化
-
预测与校正:
- 包含预测步骤和更新步骤
- 预测步骤利用系统模型进行预测
- 更新步骤利用测量值进行校正
-
适应性:
- 能够处理缺失数据
- 可以适应系统参数的变化
- 可以扩展处理非线性系统
数学原理
卡尔曼滤波器的数学原理基于两个主要步骤:预测和更新。
预测步骤
状态预测方程:
x̂ₖ|ₖ₋₁ = Fₖx̂ₖ₋₁|ₖ₋₁
其中:
- x̂ₖ|ₖ₋₁ 是k时刻的状态预测
- Fₖ 是状态转移矩阵
- x̂ₖ₋₁|ₖ₋₁ 是k-1时刻的状态估计
误差协方差预测方程:
Pₖ|ₖ₋₁ = FₖPₖ₋₁|ₖ₋₁Fₖᵀ + Qₖ
其中:
- Pₖ|ₖ₋₁ 是预测误差协方差
- Qₖ 是过程噪声协方差
更新步骤
卡尔曼增益计算:
Kₖ = Pₖ|ₖ₋₁Hₖᵀ(HₖPₖ|ₖ₋₁Hₖᵀ + Rₖ)⁻¹
其中:
- Kₖ 是卡尔曼增益
- Hₖ 是观测矩阵
- Rₖ 是观测噪声协方差
状态更新方程:
x̂ₖ|ₖ = x̂ₖ|ₖ₋₁ + Kₖ(zₖ - Hₖx̂ₖ|ₖ₋₁)
其中:
- x̂ₖ|ₖ 是更新后的状态估计
- zₖ 是观测值
误差协方差更新:
Pₖ|ₖ = (I - KₖHₖ)Pₖ|ₖ₋₁
代码实现
环境准备
首先需要安装必要的Python包:
# requirements.txt
numpy>=1.21.0
matplotlib>=3.4.0
完整代码实现
下面是一个完整的卡尔曼滤波器实现,包括一个简单的运动跟踪示例:
import numpy as np
import matplotlib.pyplot as plt
import os
# 设置随机数种子以保证结果可重复
np.random.seed(0)
# 确保图片保存路径存在
SCRIPT_DIR = os.path.dirname(os.path.abspath(__file__))
IMAGES_DIR = os.path.join(SCRIPT_DIR, 'images')
os.makedirs(IMAGES_DIR, exist_ok=True)
# 生成真实数据
def generate_true_data(n_points=50):
"""
生成真实的位置数据
参数:
n_points: 数据点数量
返回:
true_positions: 真实位置数组
"""
t = np.linspace(0, 10, n_points)
true_positions = 0.1 * t**2 # 模拟一个加速运动
return t, true_positions
# 添加测量噪声
def add_measurement_noise(true_positions, noise_std=2.0):
"""
向真实数据添加测量噪声
参数:
true_positions: 真实位置数组
noise_std: 噪声的标准差
返回:
measurements: 带噪声的测量值
"""
noise = np.random.normal(0, noise_std, size=true_positions.shape)
return true_positions + noise
class KalmanFilter:
def __init__(self, dt, process_variance, measurement_variance):
"""
初始化卡尔曼滤波器
参数:
dt: 时间步长
process_variance: 过程噪声方差
measurement_variance: 测量噪声方差
"""
self.dt = dt
self.process_variance = process_variance
self.measurement_variance = measurement_variance
# 状态转移矩阵
self.A = np.array([[1, dt],
[0, 1]])
# 测量矩阵
self.H = np.array([[1, 0]])
# 过程噪声协方差
self.Q = np.array([[0.25 * dt**4, 0.5 * dt**3],
[0.5 * dt**3, dt**2]]) * process_variance
# 测量噪声协方差
self.R = np.array([[measurement_variance]])
# 初始状态估计
self.x = np.array([[0],
[0]])
# 初始估计误差协方差
self.P = np.array([[1000, 0],
[0, 1000]])
def predict(self):
"""预测步骤"""
self.x = np.dot(self.A, self.x)
self.P = np.dot(np.dot(self.A, self.P), self.A.T) + self.Q
return self.x[0]
def update(self, measurement):
"""更新步骤"""
S = np.dot(np.dot(self.H, self.P), self.H.T) + self.R
K = np.dot(np.dot(self.P, self.H.T), np.linalg.inv(S))
y = measurement - np.dot(self.H, self.x)
self.x = self.x + np.dot(K, y)
I = np.eye(2)
self.P = np.dot((I - np.dot(K, self.H)), self.P)
return self.x[0]
实例分析
在这个示例中,我们模拟了一个加速运动的物体,并使用卡尔曼滤波器来估计其位置:
def main():
# 生成数据
t, true_positions = generate_true_data()
measurements = add_measurement_noise(true_positions)
# 创建卡尔曼滤波器实例
dt = t[1] - t[0] # 时间步长
kf = KalmanFilter(dt=dt, process_variance=0.1, measurement_variance=4.0)
# 存储估计结果
estimates = []
# 进行滤波
for measurement in measurements:
kf.predict()
estimated_position = kf.update(measurement)
estimates.append(float(estimated_position))
# 可视化结果
plt.figure(figsize=(12, 6))
plt.plot(t, true_positions, 'g-', label='真实位置')
plt.plot(t, measurements, 'r.', label='测量值')
plt.plot(t, estimates, 'b-', label='卡尔曼滤波估计')
plt.xlabel('时间')
plt.ylabel('位置')
plt.title('卡尔曼滤波跟踪示例')
plt.legend()
plt.grid(True)
plt.savefig(os.path.join(IMAGES_DIR, 'kalman_tracking.png'))
plt.close()
# 计算误差
mse_raw = np.mean((measurements - true_positions) ** 2)
mse_filtered = np.mean((np.array(estimates) - true_positions) ** 2)
print(f"原始测量的均方误差: {mse_raw:.2f}")
print(f"卡尔曼滤波后的均方误差: {mse_filtered:.2f}")
结果分析
运行上述代码后,我们得到了以下结果:
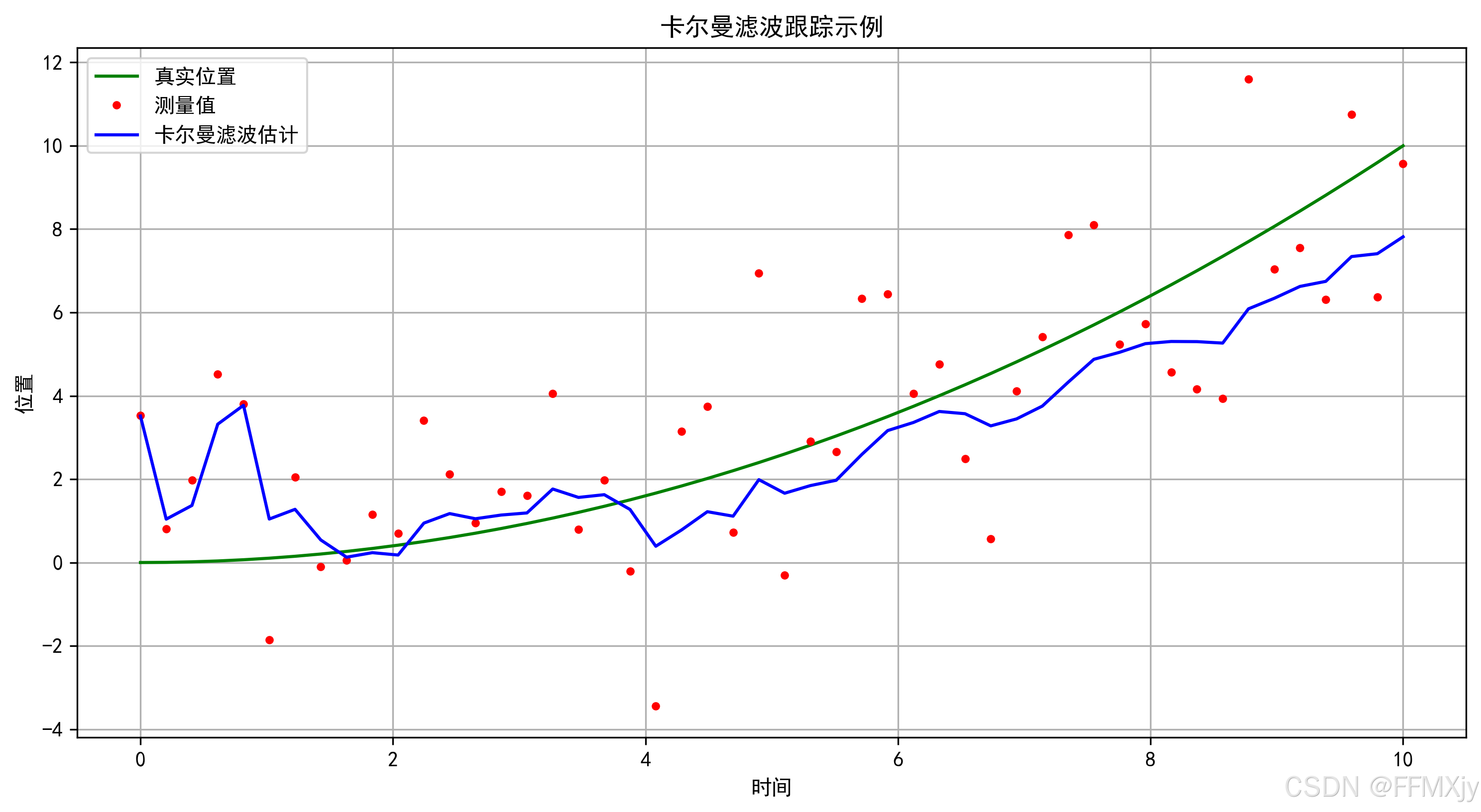
从结果可以看出:
- 绿线表示物体的真实轨迹
- 红点表示带有噪声的测量值
- 蓝线表示卡尔曼滤波器的估计结果
通过均方误差的比较:
- 原始测量的均方误差:5.15
- 卡尔曼滤波后的均方误差:1.94
可以看出,卡尔曼滤波显著降低了测量噪声的影响,提供了更准确的状态估计。
应用场景
卡尔曼滤波器在多个领域都有广泛应用:
-
导航系统
- GPS定位
- 惯性导航系统
- 航天器轨道确定
-
机器人技术
- 移动机器人定位
- 传感器融合
- 目标跟踪
-
信号处理
- 雷达跟踪
- 图像处理
- 语音信号处理
-
经济金融
- 股票价格预测
- 经济指标估计
- 风险评估
-
工业控制
- 过程控制
- 质量监控
- 故障检测
注意事项
在使用卡尔曼滤波器时,需要注意以下几点:
-
系统模型的准确性
- 状态转移矩阵要准确描述系统动态
- 需要合理设置过程噪声和测量噪声的协方差
- 初始状态和协方差的设置会影响收敛速度
-
计算效率
- 矩阵求逆可能存在数值稳定性问题
- 高维状态空间会增加计算负担
- 考虑使用平方根滤波等数值稳定的变体
-
非线性系统
- 标准卡尔曼滤波器只适用于线性系统
- 对于非线性系统,考虑使用扩展卡尔曼滤波器(EKF)或无迹卡尔曼滤波器(UKF)
- 非线性越强,估计效果可能越差
-
参数调优
- 过程噪声和测量噪声的协方差需要根据实际情况调整
- 可以通过实验数据或仿真来优化参数
- 考虑使用自适应方法动态调整参数
-
实时性要求
- 确保计算速度满足实时处理需求
- 考虑使用并行计算或简化模型
- 在精度和效率之间找到平衡
同学们如果有疑问可以私信答疑,如果有讲的不好的地方或可以改善的地方可以一起交流,谢谢大家。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









