




该篇博客用于记录一下科研中遇到的工程问题。
采用mujoco的可执行文件complie进行转换,该方法使用mujoco-3.2.0测试可行。
进入mujoco可执行文件夹中,比如我的版本是3.2.0,那么默认是~/.mujoco/mujoco-3.2.0/bin,
运行命令
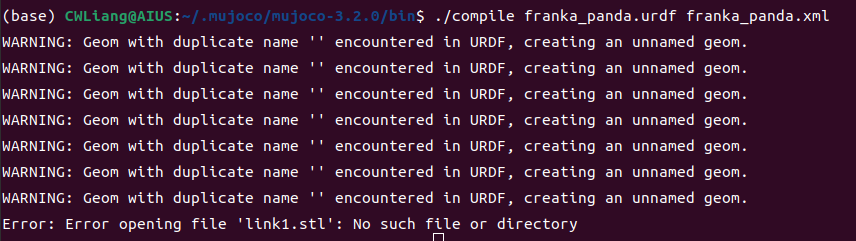
./compile franka_panda.urdf franka_panda.xml
其中franka_panda.urdf是要转换的文件名,franka_panda.xml转换成的xml文件名
实践中发现,如果urdf有需导入三维文件,那么urdf文件和其需要导入的三维模型文件需要在同一路径下,否者会报找不到文件的错误
比如现在我文件放在meches文件夹中,即使在urdf中改了路径,定位到meshes文件夹,还是会报错
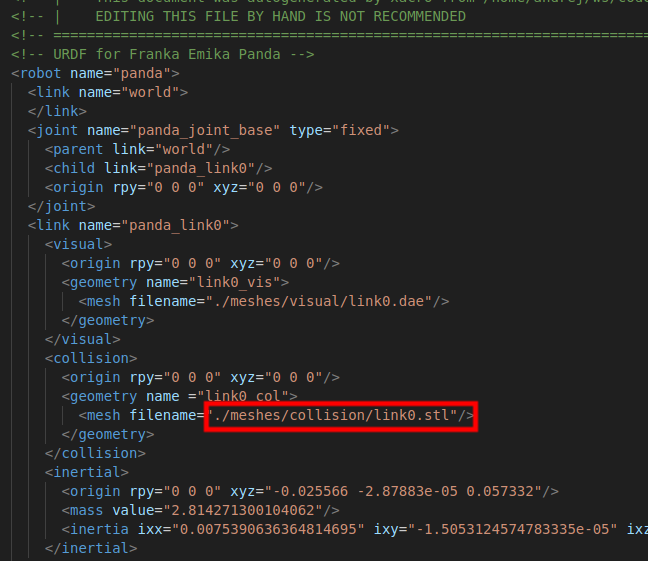

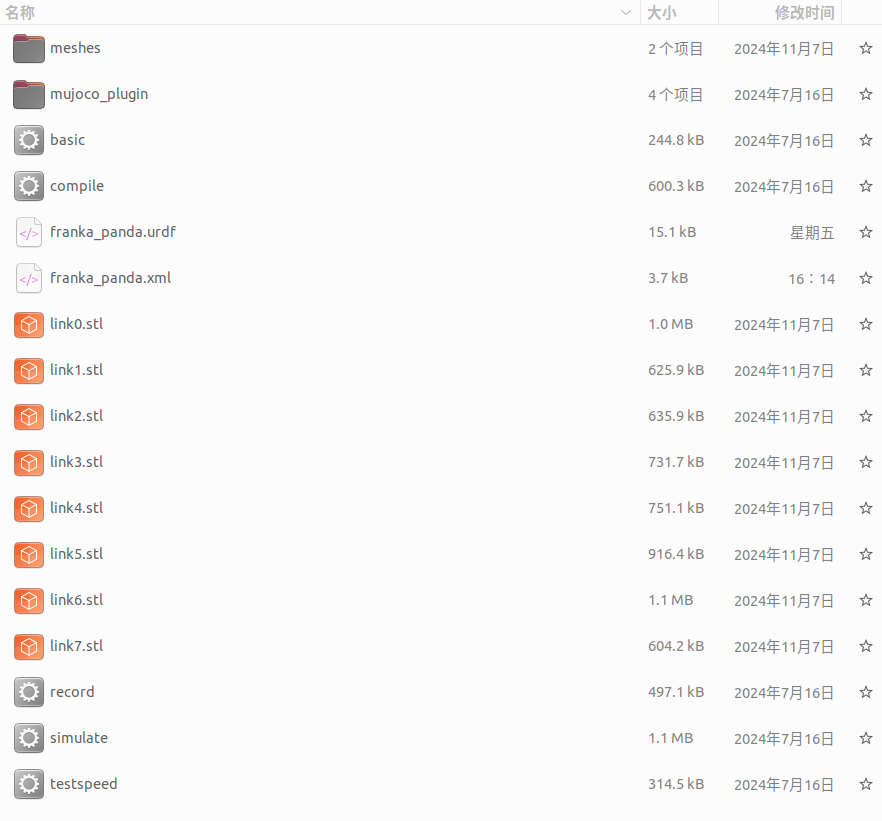
所以索性直接放在同一路径下,

那些警告好像是因为geom名字重复了,不重要,可以忽略
可以用./simulate打开生成的xml文件
./simulate franka_panda.xml
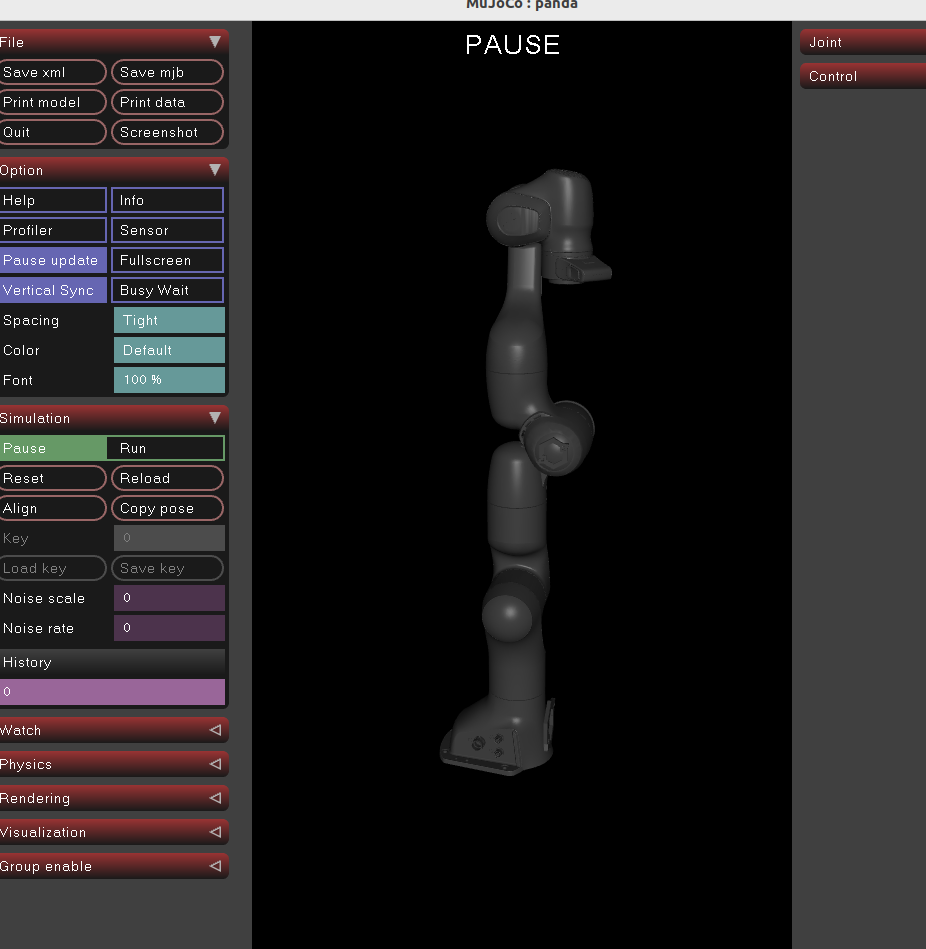
剩下的光影啥的可以自己在xml文件中添加一些关键词设置一下。
思考
用urdf文件转xml文件比手写一个xml文件要方便很多,不过主要优势还是可以再xml文件中设置惯量矩阵,目前我在xml文件中只能设置惯量矩阵的主对角值,但实际情况下应该是一个3*3矩阵,含6个变量。观察生成的xml文件可以发现,其实xml文件是通过设置inertial的姿态来处理这个问题的,就是说本来是一个3*3含有6个变量的矩阵,这个惯量矩阵在默认姿态下表示,那么我通过设置姿态不是默认姿态,比如这里quat="0.981683 0.190521 5.76953e-06 -2.97282e-05",那就可以用仅含有三个变量的对角惯量矩阵达到同样的效果。


















 1612
1612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









