



一、相关环境配置
在安装ROS2之前,我们需要先将环境配置好,这样才能保证ROS2的安装及日后运行操作。ROS2是结合了C++和Python3的特点进行重新设计的,因此需要配置好C++、Python的环境,当然ROS2支持多种编程语言,但这里先针对C++和Python进行简单的环境配置。
默认的Ubuntu软件源包含了一个软件包组:build-essential,该包组包含了GNU编辑器集合、GNU调试器,以及其他编译软件所必须的开发库和工具,所以先安装build-essential。
sudo apt install build-essential
二、Python的配置
由于Ubuntu是自带了Python的,先来看一下目前环境中Python的相关文件和链接。
cd /usr/bin
ls -l | grep python
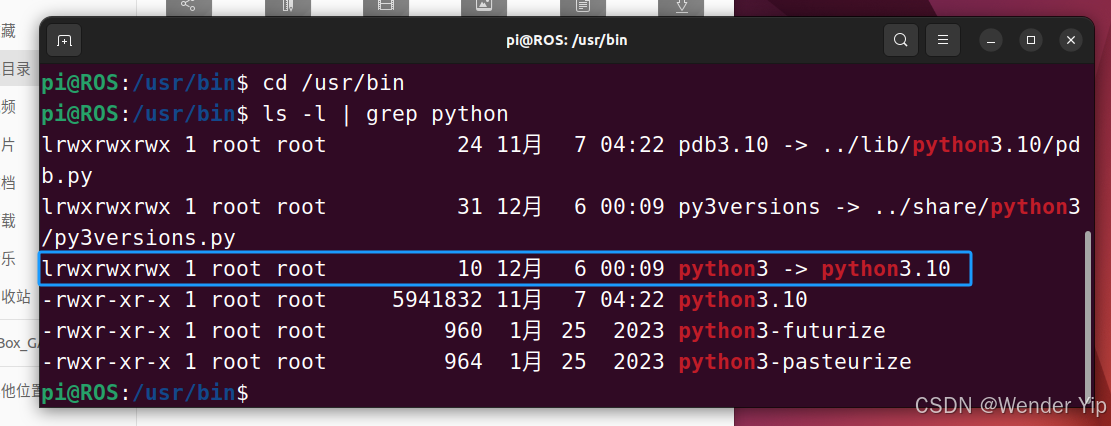
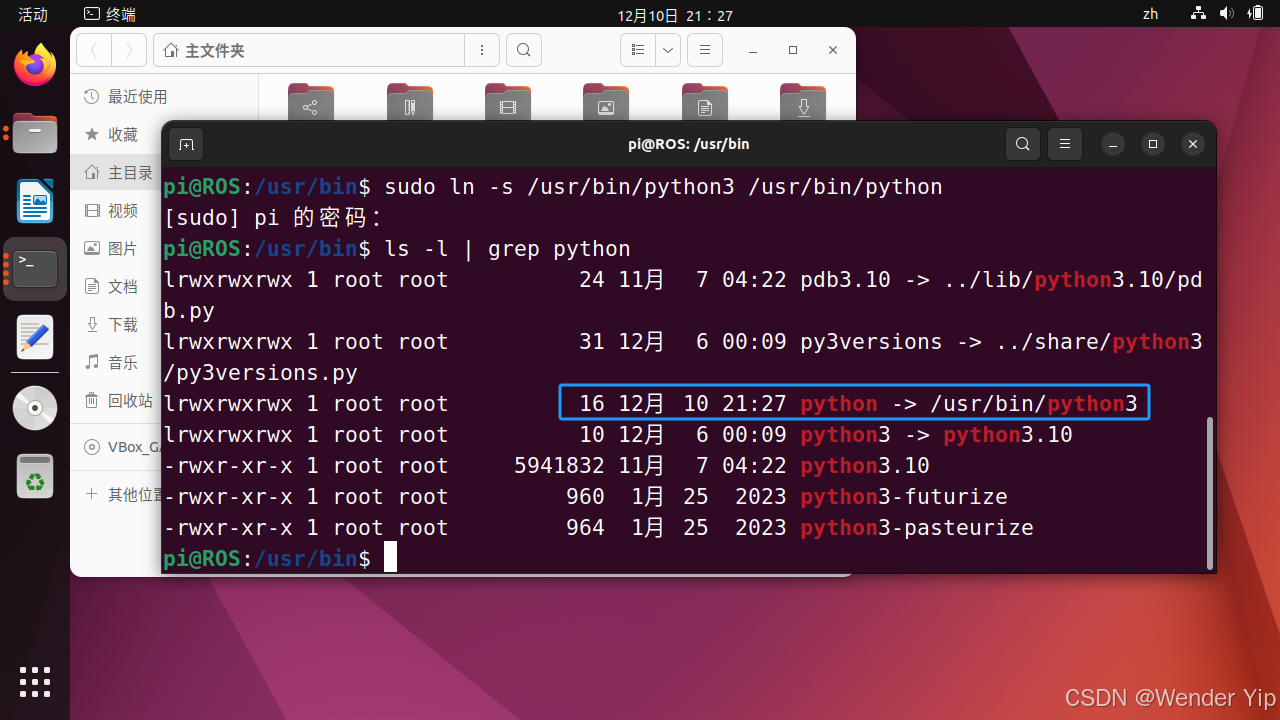
可以 看到目前是python3指向python3.10,并没有python指向python3的链接,输入指令:
sudo ln -s /usr/bin/python3 /usr/bin/python
随后再次执行命令可以看到出现了python到python3的链接。
写一个简单的Python代码进行运行,测试Python是否配置好,测试的简单代码如下。
import os
for a in range(10):
if a < 10:
print('a = ' , a)
a += 1
else:
break;
print("The End!")
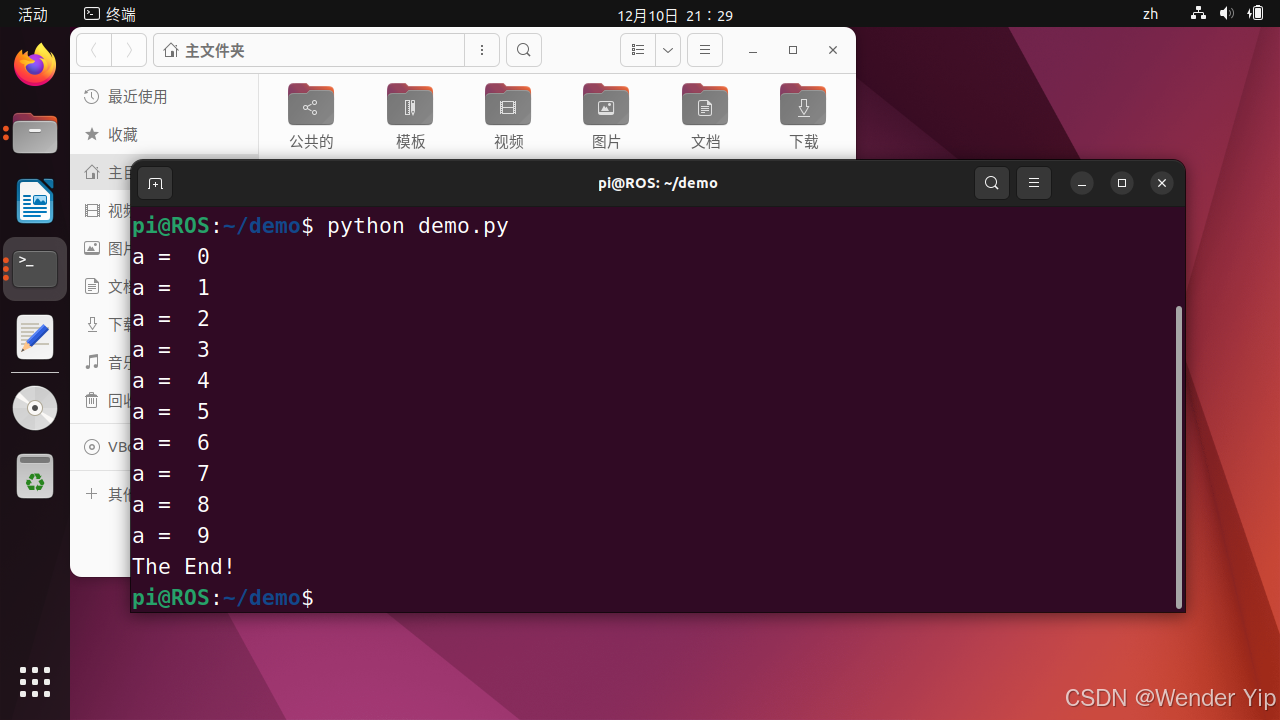
代码正常运行,证明Python已经配置好了。
三、验证C++的编译环境配置
简单写一个测试代码:
#include <iostream>
using namespace std;
int main()
{
for(int a = 5; a < 10; a++)
{
cout << "a = " << a << endl;
}
return 0;
}
先用传统的编译方法编译该代码,输入指令:
g++ demo.cpp -o demo.exe
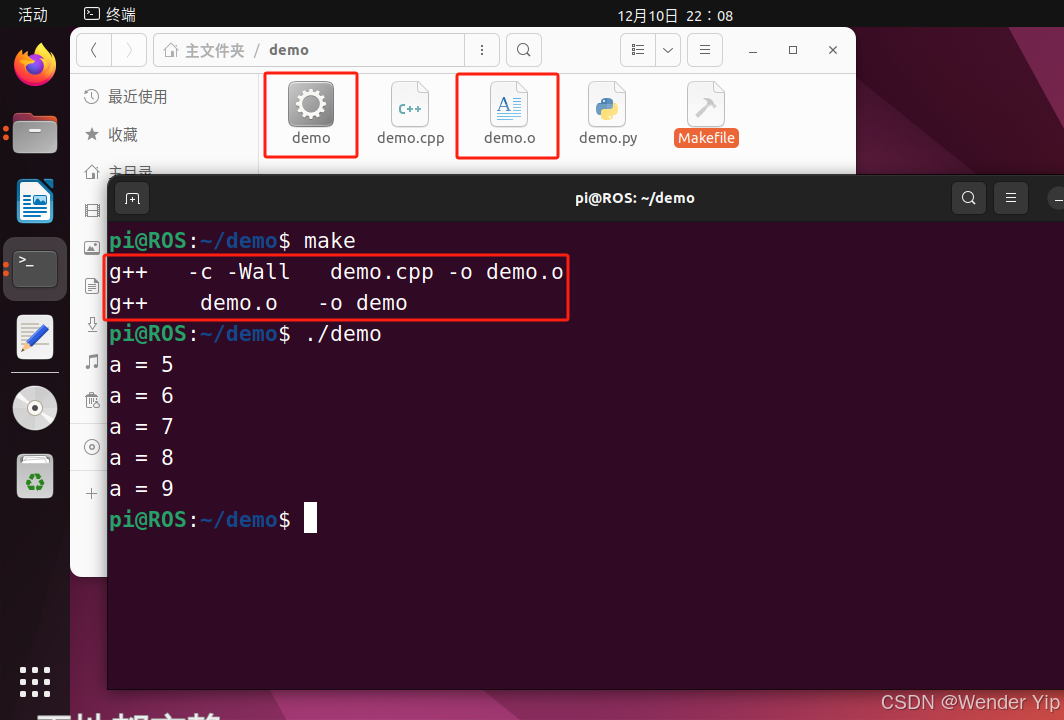
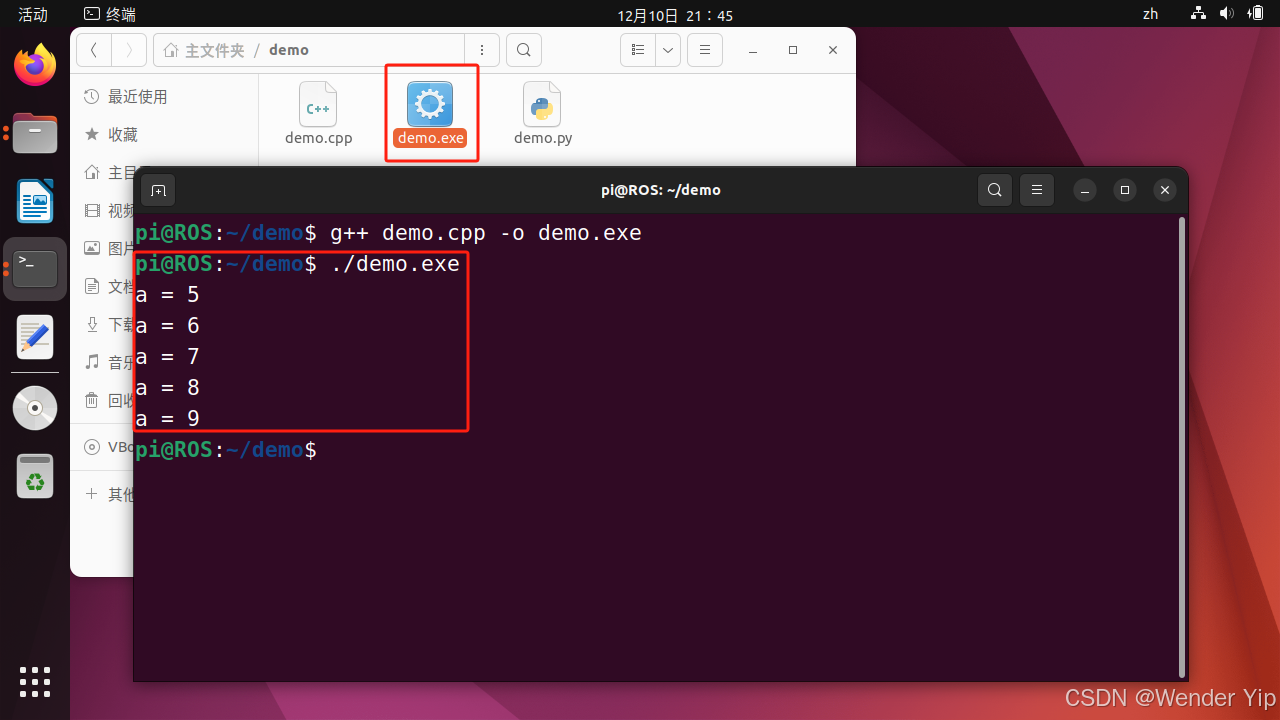 可以看到成功编译出可执行程序,并且可以正常运行,接着使用make工具进行操作,先写一个简单的makefile
可以看到成功编译出可执行程序,并且可以正常运行,接着使用make工具进行操作,先写一个简单的makefile
# 预定义变量
CC = g++
CFLAGS = -c -Wall
LDFLAGS =
# 预定义目标
SOURCES = demo.cpp
OBJS = $(SOURCES:.cpp=.o)
BIN = demo
# 默认目标
all: $(BIN)
# 链接目标
$(BIN): $(OBJS)
$(CC) $(LDFLAGS) $(OBJS) -o $@
# 编译目标
.cpp.o:
$(CC) $(CFLAGS) $< -o $@
clean:
rm -rf $(OBJS) $(BIN)
在终端输入make指令进行编译,随后运行代码,代码成功运行则说明C++的编译环境没有问题
由于makefile比较麻烦,所以一般用CMake工具进行编译,先用指令查看Ubuntu是否安装了CMake:
cmake --version
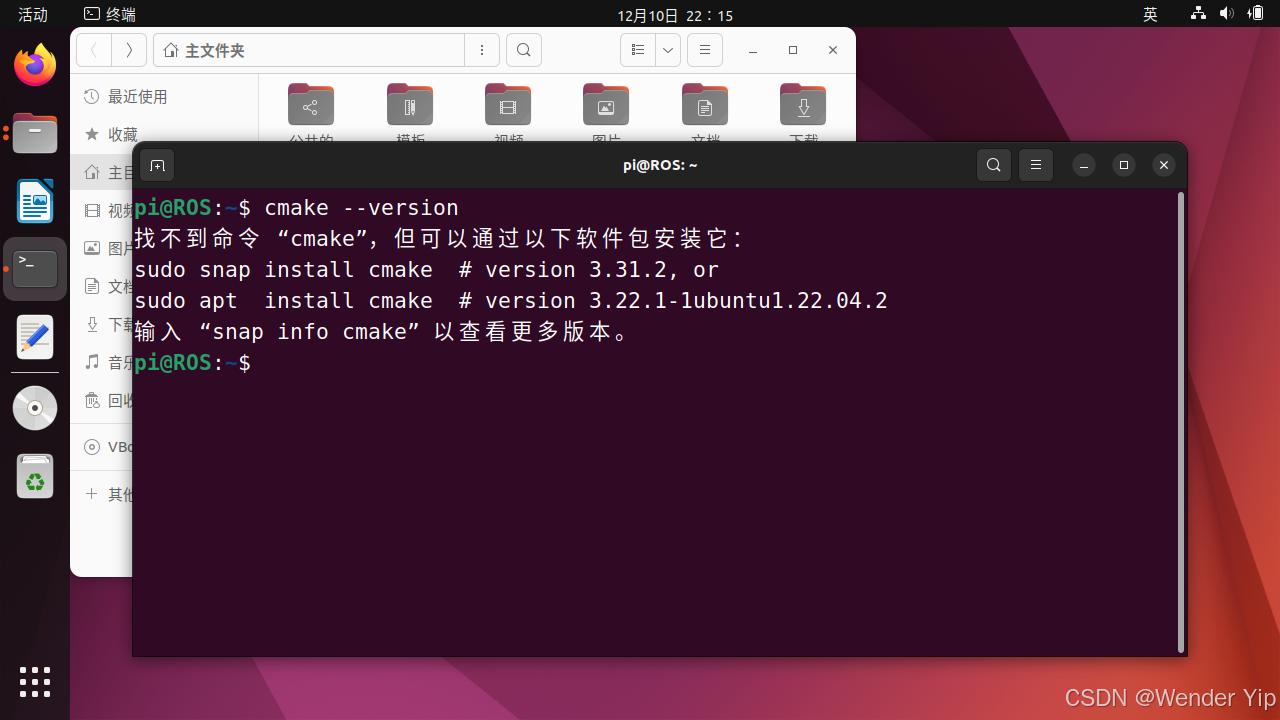
可以看到目前Ubuntu是没有安装cmake的,只需要按照指示进行安装即可。
sudo apt install cmake

安装完成后再输入cmake --version,就可以看到已安装的cmake版本了,以上就完成了一些相关环境的配置工作,接下来就要进行ROS2的安装。


















 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









