



一、ROS2安装
将虚拟机、Ubuntu22.04 LTS,以及相关的环境配置设置好之后,终于是到了ROS2的安装步骤,ROS2的安装我是在B站上看鱼香ROS的ROS2教学进行安装。
首先在终端中输入代码进行更新:
sudo apt update
更新完成后输入以下命令用fihros的工具进行安装(之前用的传统方法,但是出了问题,有一个包一直接不上)
wget http://fishros.com/install -O fishros
输入该代码时有可能不成功,此时关闭重新打开终端走一遍流程就行了(我就是关了重新来了第二次),下载好之后输入以下指令运行安装工具:
. fishros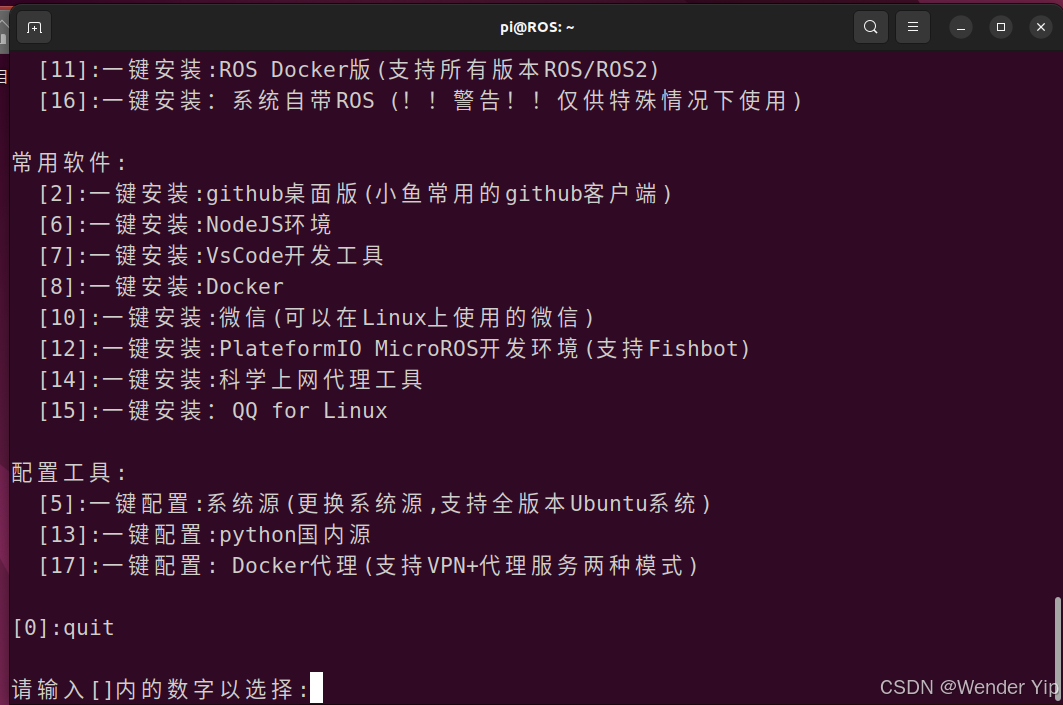
此时会出来一个菜单,输入1后回车即可
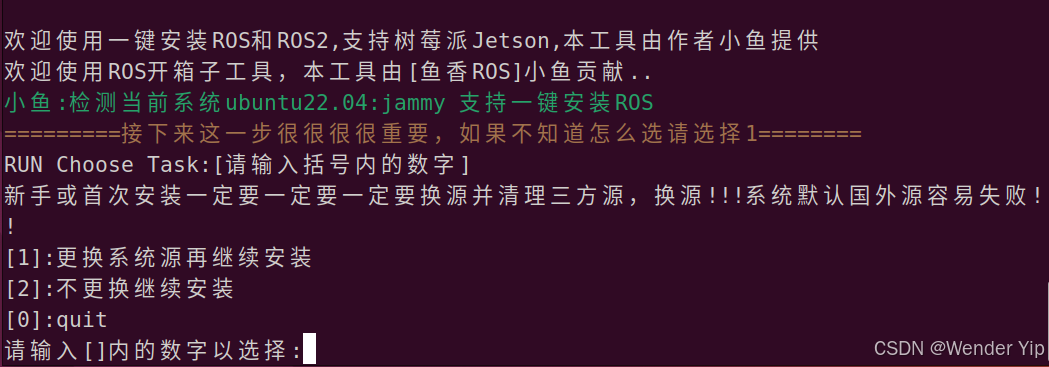
由于之前设置的时候已经更换了国内的镜像源,因此直接输入2即可。
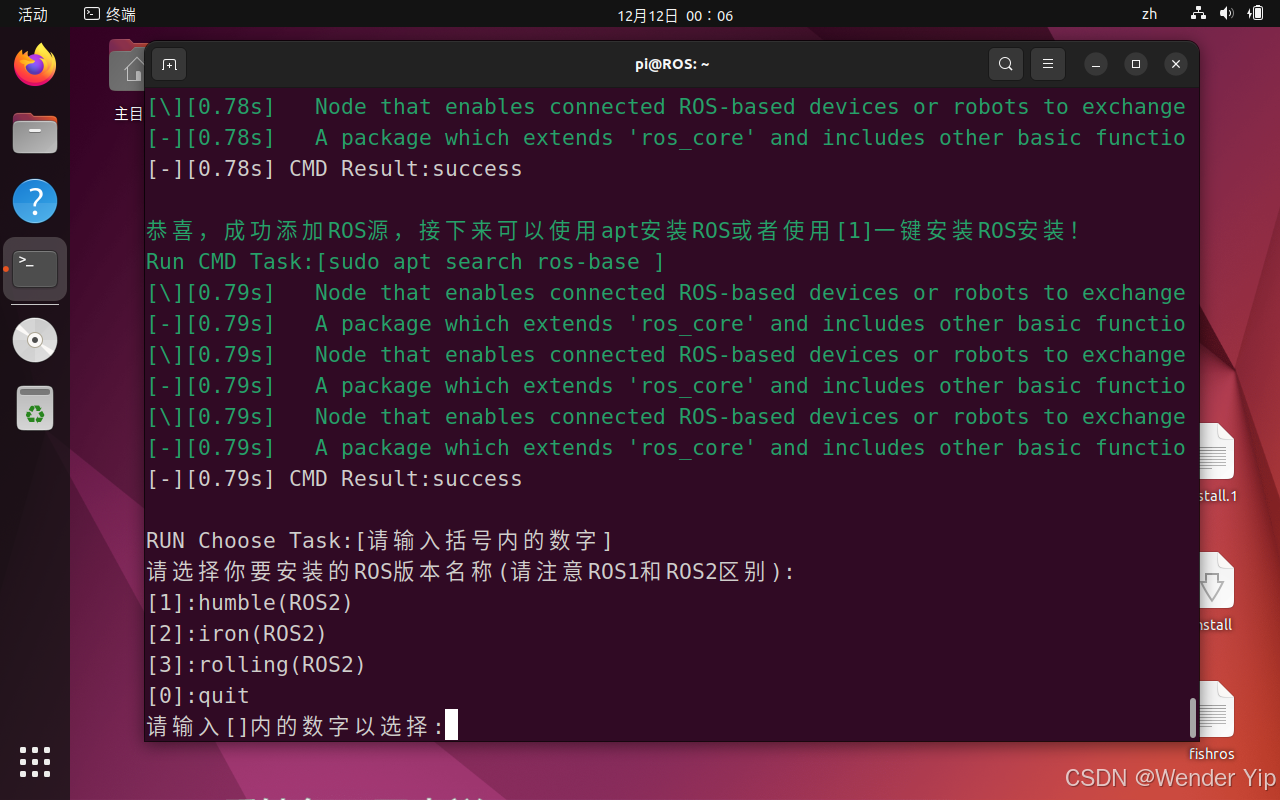
该程序可以自动帮助我们调整源来确保相关包的正常下载,还是比较便利的,由于本系统是Ubuntu22.04LTS,对应的版本是humble,因此输入1。
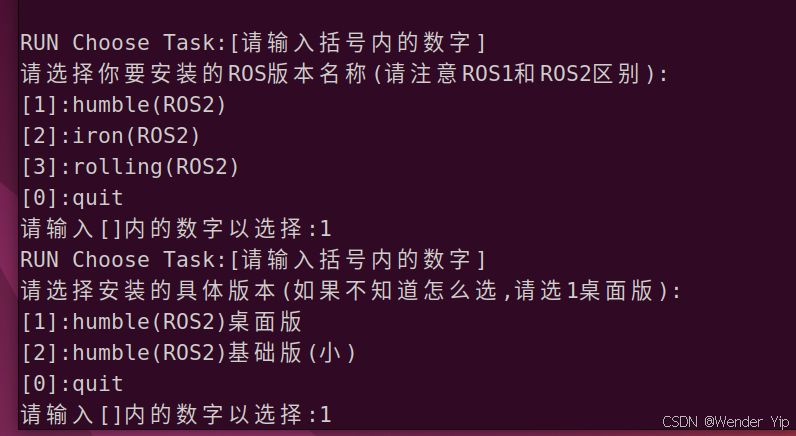
我们要装的是桌面版,所以直接输入1即可。
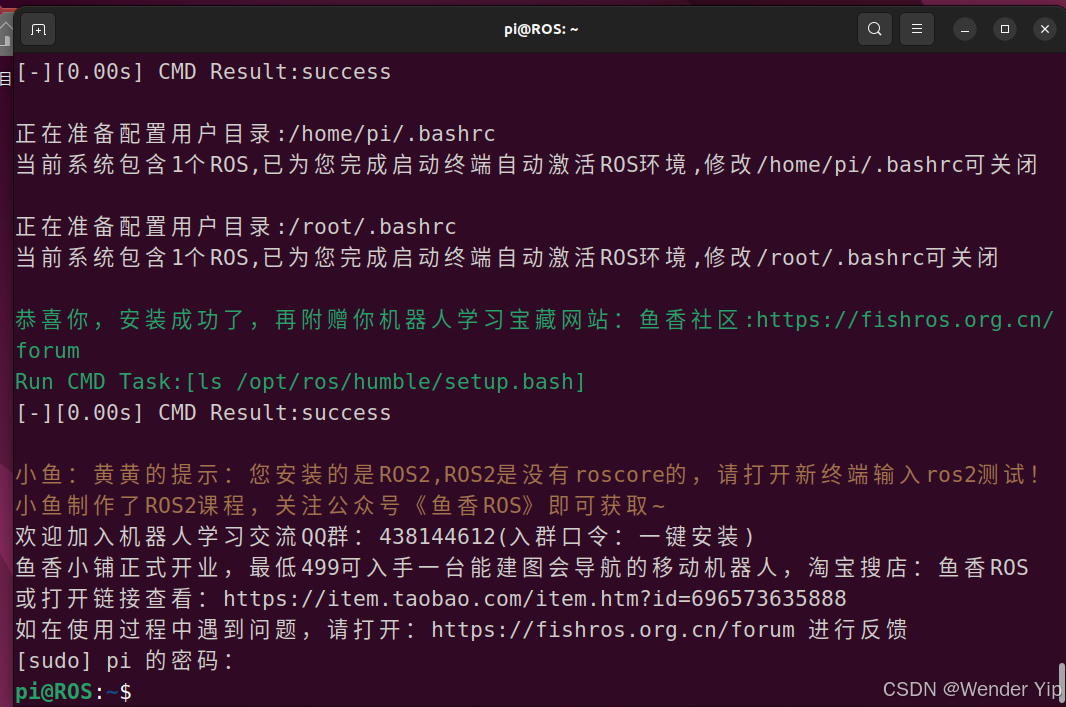
最后再输入密码就可以完成ROS2的安装了,先前用了另外一个传统的方法,也记录一下。
二、旧方法(失败放弃了)
1、设置编码
该方法是我一开始在B站上跟古月居的ROS2入门21讲进行的安装步骤,首先是设置编码,在终端中输入代码:
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8

以上就设置好编码了。
2、添加源
设置好编码后添加ROS2的软件源,输入以下代码:
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
接着来安装密钥:


3、ROS2安装(失败于这一步)
前面的配置好后就可以正式安装ROS2了,输入以下代码:
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop在输入update指令时,报告说packages.ros.org连接超时,通过搜索找到更换清华源的方法,下面附上,先输入指令:
sudo gedit /etc/apt/sources.list登入网址:https://mirrors.tuna.tsinghua.edu.cn/help/ubuntu/
选择对应的Ubuntu版本并生成代码
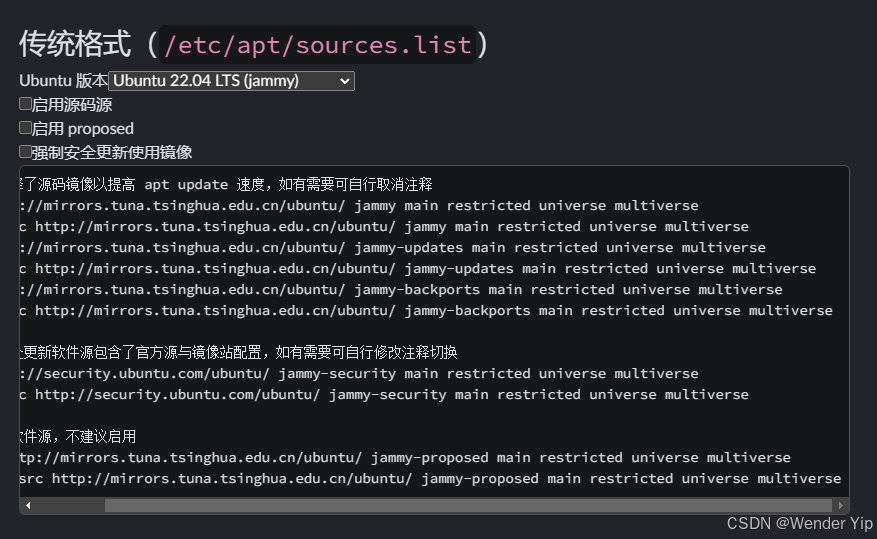
复制到 先前指令打开的sources.list文件里。
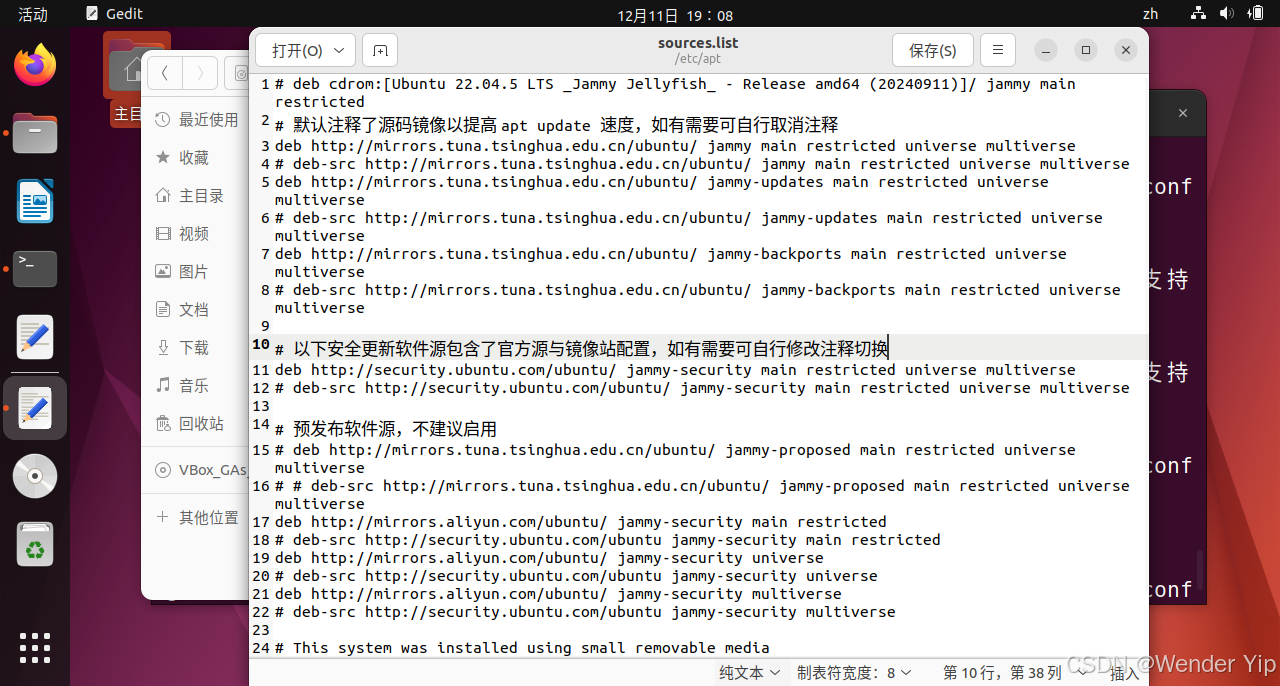
再加入一下清华的ROS源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' 
此时再次输入update的指令 ,但是结果是有的包仍旧是无法连接,因此放弃了该方法,放在这里仅作记录,不得不说鱼香ROS的工具确实做的很方便,比较傻瓜式的操作更有利于新手的操作,以及提高效率,尤其是做配置这种比较麻烦的活,经常时不时就来点问题的。
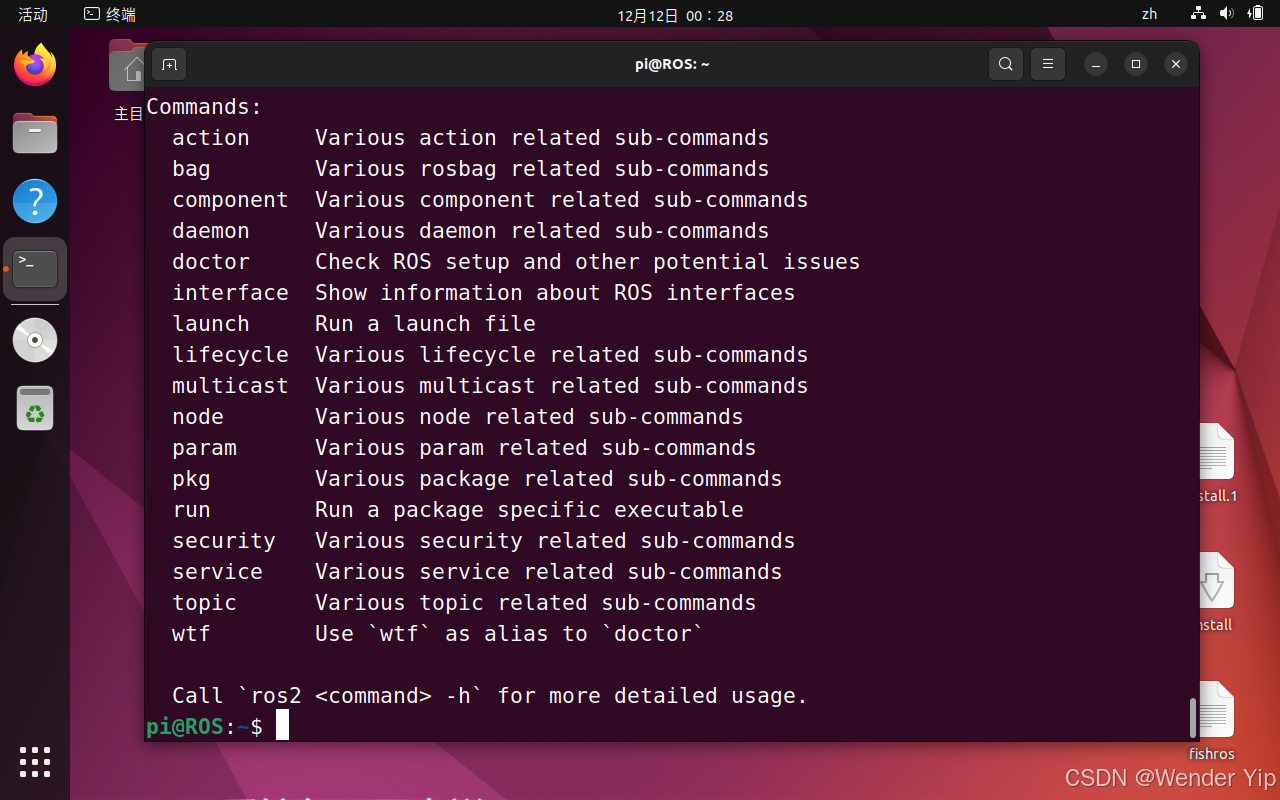
三、安装验证
安装好后继续输入指令:ros2 ,可以看到已安装的ros2情况
输入指令
whereis ros2 
根据路径就可以找到安装好的ROS2的所有相关文件了
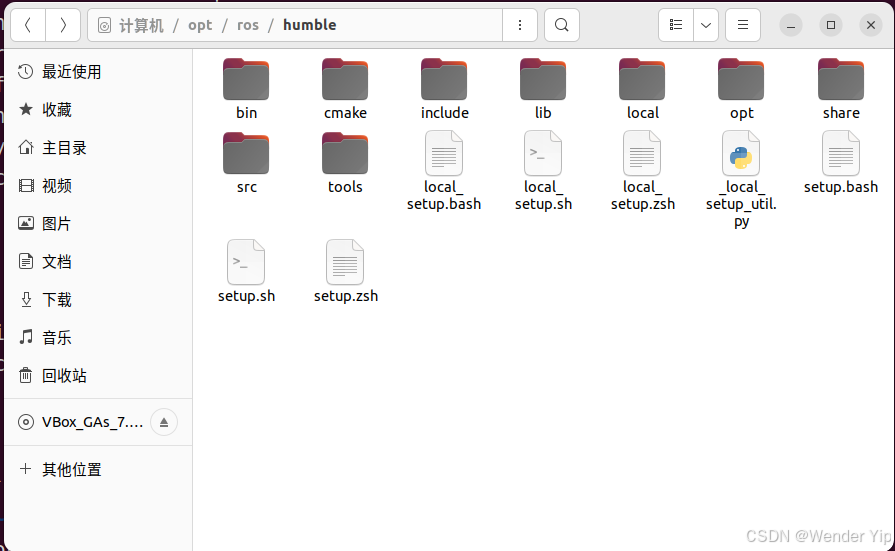
至此,ROS2的安装就已经完成。

















 2942
2942

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









