







RGB点云图(来源于网络)
在自动驾驶、机器视觉等领域,多传感器协同感知是系统可靠运行的核心,无论是定位导航、构建地图、还是障碍物检测,都必须依赖摄像头和其他传感器(如激光雷达、IMU等)的数据融合。而时间同步在数据融合中扮演了关键的角色,特别是在自动驾驶、移动机器人等高速运动场景中,对同步性要求更高,通常需要达到1毫秒(ms,1e-3s)以内精度。
英伟达 Jetson AGX Orin 凭借高算力与灵活扩展性,成为自动驾驶、移动机器人等领域的主流计算平台。然而,如何实现接入Orin平台的摄像头高精度同步仍是关键挑战。
当前,市面主流的摄像头方案各有特点:USB 摄像头即插即用,但连接不稳定,无同步机制,易丢帧;网络摄像头适配性好,但需额外同步信号,且传输时延长(约 100ms);GMSL 摄像头连接稳定,低时延,支持同步信号透传,同步精度理论上可达微秒(μs,1e-6s)级,是自动驾驶、机器人视觉传感器的优选方案。
当GMSL 摄像头接入 Jetson AGX Orin 平台时,通常利用 Orin 内置定时器生成触发信号,经 FPC 排线传输至解串器,再通过 GMSL 链路透传控制摄像头曝光。
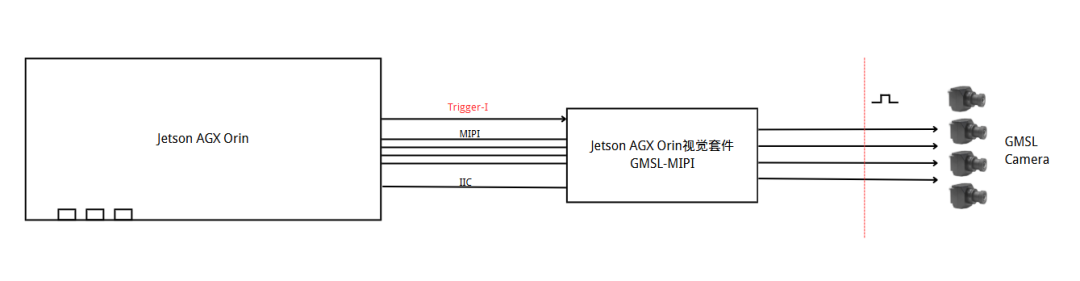
Orin主机软件驱动同步示例图
GMSL 2协议具有高达6Gbps的传输带宽,支持点对点链路通信,硬件信号直接收发的机制,确保主机发出的硬件触发信号以极低的时延(<20μs)到达设备端(例如摄像头),同时多路设备接收到的触发信号时间差非常小(<2μs)。
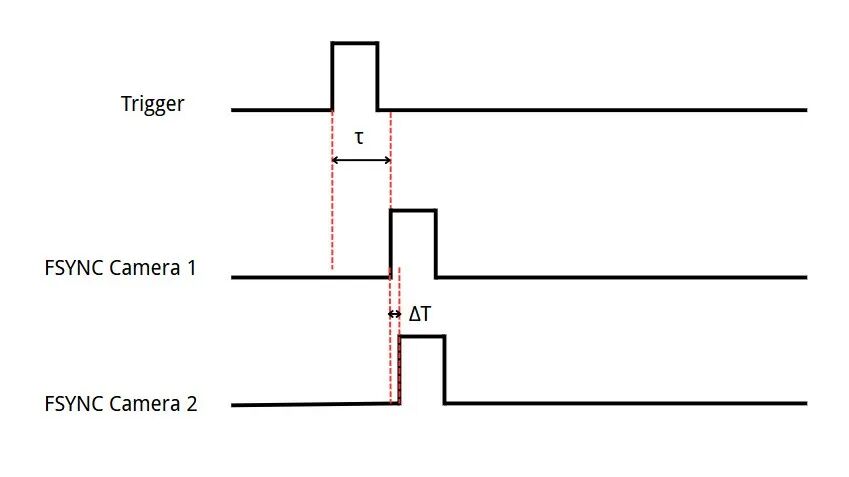
GMSL摄像头时间同步逻辑示意图
注:τ 是触发信号(Trigger)到Sensor曝光控制信号(FSYNC)的传输延迟 < 20μs;ΔT是两相机间 Trigger 信号到达 CMOS 的时间差 < 2μs,体现了GMSL 具备低时延与高同步性的特点。
GMSL摄像头两路外同步曝光Trigger时序实测图
然而,在Jetson Orin系统里,通常使用PWM(脉宽调制)信号或GPIO脉冲作为触发信号。PWM可以输出固定频率(例如30Hz)的周期信号,更适合作为摄像头的触发控制信号。但摄像头因内部采用多帧融合工作机制,对时序要求极为严格,控制信号精度需达到微秒级,否则易出现丢帧、错帧等问题。而在Jetson Orin系统中,除非使用专门的硬件控制PWM时序,否则其精度无法满足摄像头的要求。
解决方案与技术架构
此前已推出配套 Jetson AGX Orin 的视觉开发套件,结合在视觉传感与自动驾驶领域的技术积累,创新性地提出“硬件触发 + 协议授时”组合策略,打造跨平台、高精度时间同步解决方案,覆盖从多路摄像头同步到多传感器融合的全场景需求。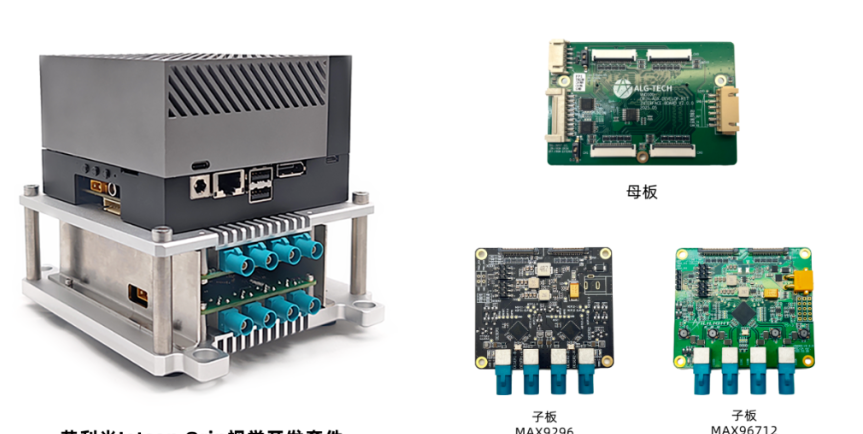
微秒级视觉同步:硬件触发,规避系统延迟
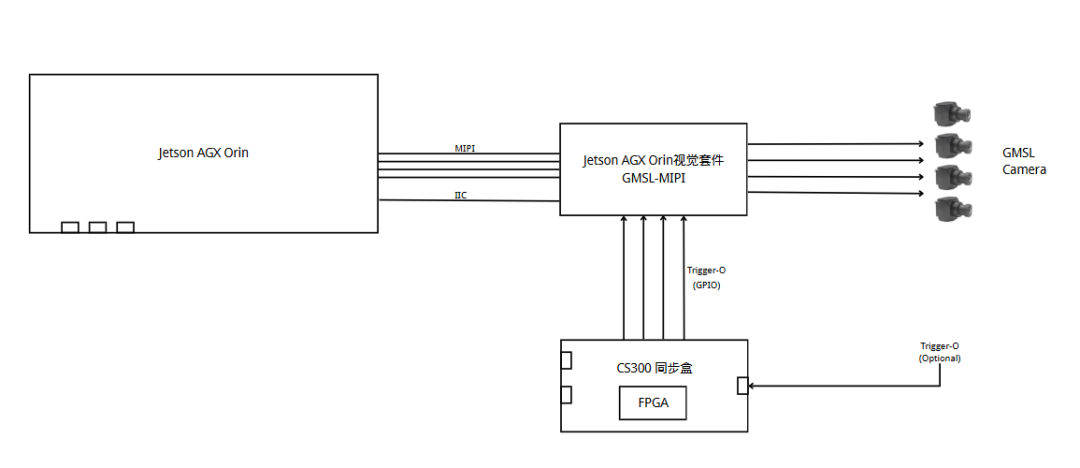
同步盒高精度同步示例图
核心机制: CS300同步盒可生成 10-120Hz 高精度触发信号,精度达亚微秒级,经 GMSL 通道传递至摄像头以控制曝光同步。
同时,CS300同步盒还支持外接同步信号源并进行分频处理,例如将 IMU 输出的 200Hz 同步信号分频至 20Hz,实现与摄像头的同步。
关键优势: 绕过Jetson AGX Orin主机软件层及操作系统调度,彻底消除由此引入的抖动和延迟,实现稳定可靠、亚微秒级别的视觉设备硬件同步,并且支持摄像头与外部传感器的同步控制。
系统级时钟对齐:PTP授时,构建统一时间基准
由于不同传感器硬件特性与传输链路差异(例如激光雷达通常支持 PTP 授时并自带时间戳,而摄像头与 IMU 则无),因此为满足多传感器的高精度融合需求,需构建统一的系统级时间基准。而CS300同步盒支持PTP 和 gPTP 主/从模式,可作为精准时钟源。
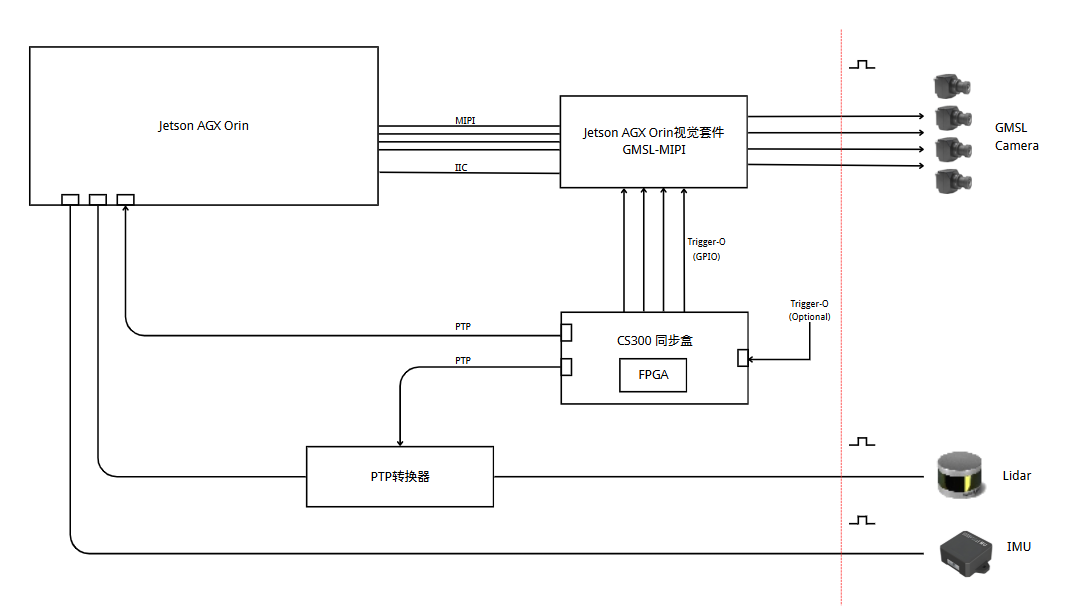
CS300同步盒授时同步示例图
核心机制: CS300同步盒与Jetson AGX Orin(配置为PTP从时钟)、支持PTP的激光雷达等传感器,共同构建分布式时间同步网络。
关键优势: 通过PTP协议实现系统内所有设备(Orin、摄像头、LiDAR、IMU等)的高精度时钟溯源与对齐,授时精度优于10微秒(μs),确保多源数据融合时具备严格的时空一致性。对于非PTP设备(如普通摄像头),其触发时刻或采集数据的时间戳可基于此统一时钟基准进行对齐。
方案优势与应用价值
基于 Jetson AGX Orin 平台打造的时间同步方案,通过 “硬件触发 + 协议授时” 的组合策略,实现了从高精度同步到多传感器融合的灵活覆盖,同时具备三大核心价值:
1.场景适配性:支持多种同步模式,能够满足从消费级到车规级的差异化需求,在精度与成本之间达到良好平衡,且具备跨平台适用能力。
2.开发便捷性:提供适配摄像头的完整驱动与配置,支持 V4L2 协议及 ROS 框架,配套 SDK 可快速完成摄像头参数设置与同步控制,显著缩短开发周期。
3.可靠性保障:采用硬件级同步机制与抗干扰设计,可确保在复杂车载环境下稳定运行,为系统的可靠工作提供坚实保障。
目前,时间同步方案已在自动驾驶多传感器融合、移动机器人导航等对时空一致性要求严苛的领域得到广泛应用,为高可靠感知系统提供了坚实的底层技术支撑,助力相关行业的技术升级与发展。


















 1178
1178


 到【灌水乐园】发言
到【灌水乐园】发言








