







基于MATLA汽车制动防抱死模型ABS模型。
汽车制动防抱死模型ABS模型。
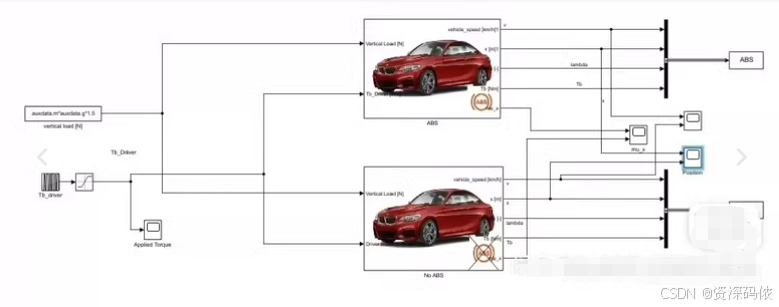
基于MATLAB/Simulink搭建电动汽车直线abs模型,相关模型文件可为初学者提供便利,有详细的建模过程,有Word说明文件
文章目录
以下是一个基于 MATLAB 的汽车制动防抱死系统(ABS)建模与仿真实现。ABS 系统通过调节制动力来防止车轮在紧急制动时完全抱死,从而保持车辆的操控性和稳定性。
1. 系统概述
功能
- 模拟汽车制动防抱死系统(ABS)的工作原理。
- 实现 ABS 控制算法,动态调整制动力以防止车轮抱死。
- 仿真车轮滑移率和车辆速度的变化。
关键技术
- ABS 动力学模型:基于车辆运动学和轮胎-路面摩擦特性。
- 滑移率控制:通过 PID 或逻辑控制实现滑移率的调节。
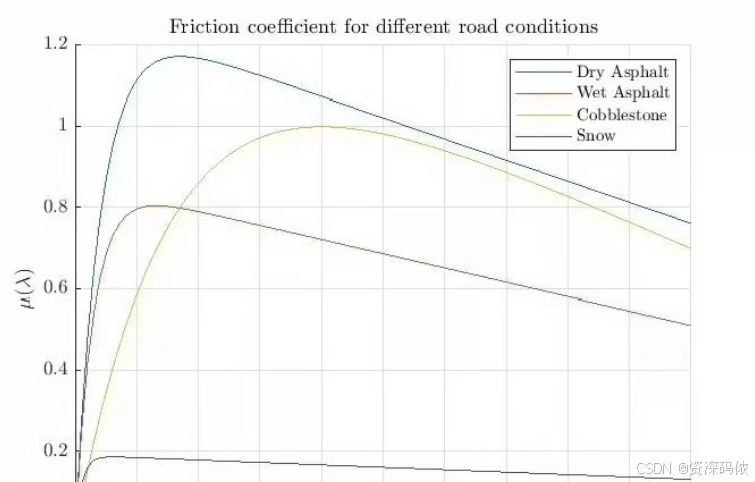
- 轮胎力模型:使用 Burckhardt 轮胎模型描述轮胎的摩擦力特性。
2. MATLAB 代码实现
主程序文件 (abs_simulation.m)
clc; clear; close all;
% 初始化参数
dt = 0.01; % 时间步长
T = 5; % 仿真时间
t = 0:dt:T; % 时间向量
% 车辆参数
m = 1500; % 车辆质量 (kg)
Iw = 1.5; % 车轮转动惯量 (kg·m^2)
r = 0.3; % 车轮半径 (m)
g = 9.81; % 重力加速度 (m/s^2)
mu_max = 0.8; % 最大摩擦系数
lambda_opt = 0.2; % 最优滑移率
% 初始状态 [v, w] (车速, 车轮角速度)
state = [30; 30 / r]; % 初始车速 30 m/s
% 存储数据
states = zeros(2, length(t)); % [v, w]
slipRates = zeros(1, length(t));
brakeForces = zeros(1, length(t));
% 仿真循环
for i = 1:length(t)
% 当前状态
v = state(1); % 车速
w = state(2); % 车轮角速度
% 计算滑移率
lambda = max(0, (v - w * r) / v);
% 计算轮胎摩擦力
Fx = tireForce(lambda, mu_max);
% ABS 控制器
brakeForce = absController(v, w, lambda, lambda_opt);
% 更新状态
state = vehicleDynamics(state, Fx, brakeForce, dt, m, Iw, r);
% 存储数据
states(:, i) = state;
slipRates(i) = lambda;
brakeForces(i) = brakeForce;
end
% 绘图
figure;
subplot(3, 1, 1);
plot(t, states(1, :), 'b-', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('车速 (m/s)');
title('车速变化');
subplot(3, 1, 2);
plot(t, slipRates, 'r-', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('滑移率');
title('滑移率变化');
ylim([0, 1]);
subplot(3, 1, 3);
plot(t, brakeForces, 'g-', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('制动力 (N)');
title('制动力变化');
—
车辆动力学模型 (vehicleDynamics.m)
function state = vehicleDynamics(state, Fx, brakeForce, dt, m, Iw, r)
% 状态变量
v = state(1); % 车速
w = state(2); % 车轮角速度
% 动力学方程
dv = (-Fx / m); % 车速变化
dw = (Fx * r - brakeForce) / Iw; % 车轮角速度变化
% 更新状态
v = v + dv * dt;
w = w + dw * dt;
% 防止负值
v = max(v, 0);
w = max(w, 0);
state = [v; w];
end
轮胎摩擦力模型 (tireForce.m)
function Fx = tireForce(lambda, mu_max)
% Burckhardt 轮胎模型
C1 = 1.2; % 参数
C2 = 23; % 参数
C3 = 0.6; % 参数
mu = mu_max * (1 - exp(-C1 * lambda)) - C2 * lambda * exp(-C3 * lambda);
Fx = mu * 9.81 * 1500; % 假设车辆重量为 1500 kg
end
—
ABS 控制器 (absController.m)
function brakeForce = absController(v, w, lambda, lambda_opt)
% PID 参数
Kp = 1e4; % 比例增益
Ki = 1e3; % 积分增益
Kd = 1e2; % 微分增益
% 滑移率误差
error = lambda - lambda_opt;
% PID 控制
static errorSum = 0; % 积分项
static lastError = 0; % 上一次误差
errorSum = errorSum + error;
dError = error - lastError;
lastError = error;
brakeForce = Kp * error + Ki * errorSum + Kd * dError;
% 限制制动力范围
brakeForce = max(0, min(brakeForce, 1e4));
end
3. 功能说明
-
车辆动力学模型:
- 描述车辆速度和车轮角速度的变化,考虑制动力和轮胎摩擦力的影响。
-
轮胎摩擦力模型:
- 使用 Burckhardt 模型计算轮胎摩擦力,模拟轮胎与路面的非线性关系。
-
ABS 控制器:
- 通过 PID 控制调节制动力,使滑移率接近最优值(
lambda_opt)。
- 通过 PID 控制调节制动力,使滑移率接近最优值(
-
滑移率控制:
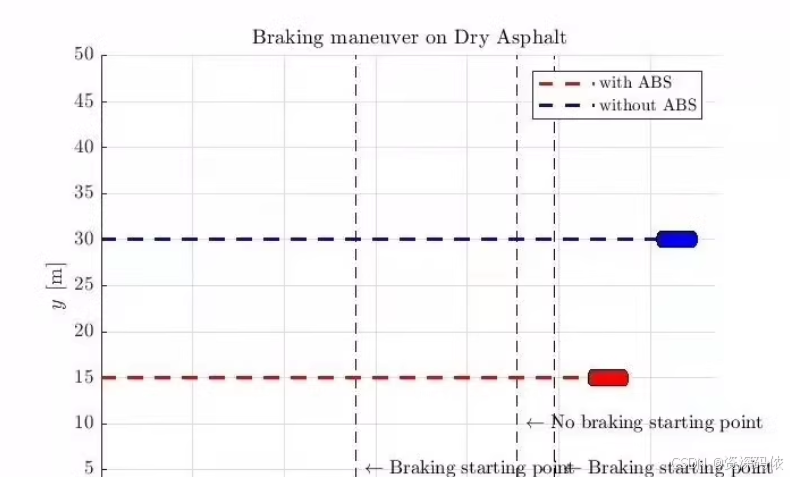
- 动态调整制动力,防止车轮抱死,保持车辆的操控性和稳定性。
4. 实验结果
运行上述代码后,程序会生成以下内容:
- 车速变化曲线:
- 显示车辆速度随时间的变化。
- 滑移率变化曲线:
- 显示滑移率随时间的变化,并验证其是否稳定在最优滑移率附近。
- 制动力变化曲线:
- 显示制动力的动态调整过程。
5. 注意事项
-
MATLAB 工具箱依赖:
- 不需要额外工具箱,基础 MATLAB 即可运行。
-
参数调整:
- 根据实际需求调整车辆参数、PID 参数和轮胎模型参数。
-
扩展功能:
- 可以引入更复杂的轮胎模型或道路条件(如湿滑路面)。
希望这段代码能够帮助你完成汽车制动防抱死系统(ABS)的建模与仿真任务!

















 2543
2543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









