







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
ORB-SLAM3是一款基于特征点的实时单目SLAM系统,是SLAM领域的研究热点之一。它的核心算法是结合了ORB特征点提取和描述子匹配、单目RGB相机的深度估计、运动估计和地图优化等步骤,能够在实时性和精度之间取得平衡,适用于各种环境下的定位和建图任务。在各种应用领域都有广泛的应用,如室内导航、自动驾驶、机器人导航、增强现实等。通过在移动机器人和自主系统中实现实时的SLAM功能,ORB-SLAM3为机器人领域的研究和应用提供了强大的支持,帮助机器人实现自主导航和定位。
ORB-SLAM3的算法原理主要包括以下几个步骤:首先,通过ORB特征点提取和描述子匹配来进行特征点的追踪和匹配;然后利用单目RGB相机的深度信息进行稀疏或稠密的深度估计;接着通过运动估计来估计相机的运动和姿态变换;最后通过地图优化来不断修正和优化地图的几何结构,从而实现实时的定位和建图。
总的来说,ORB-SLAM3作为一款领先的实时SLAM系统,不仅在技术上具有重要意义,还在社会和经济发展中发挥着积极的作用,推动了机器人技术的发展和应用,为社会带来了更多的便利和效益。
一、ORB_SLAM源码下载
打个预告:在ubuntu20.04中安装和运行ORB3相对在18.04中来讲,要简单很多,很多库都是系统自带,不需要也没必要重新下载按装下载其他的库版本,很麻烦,也会很容易搞乱了电脑环境,一定要秉承能改代码就改,不行再换库的原则,切记!!!!!,不然一不小心就喜提重装系统一次!废话不多说,开始教程。
本次教程是介绍如何在ubuntu20.04中运行ORB_SLAM3
配置的环境如下:
Ubuntu20.04、 ROS:Noetic
Opencv4.2.0、 Pangolin0.6
Boost库1.77.0版本、 Eigen3.7
先创建个工作空间,把所有要装的源代码放进工作空间目录下的src文件下,后面配ROS环境下的SLAM时要用到。这次运行的版本是master/1.0,虽然是二刷,由于ubuntu版本和以前安装的不同的原因,还是有很多坑!!!
1.源码下载
要下载master/1.0版本的源码:
下载网址:https://github.com/UZ-SLAMLab/ORB_SLAM3
版本如下所示:
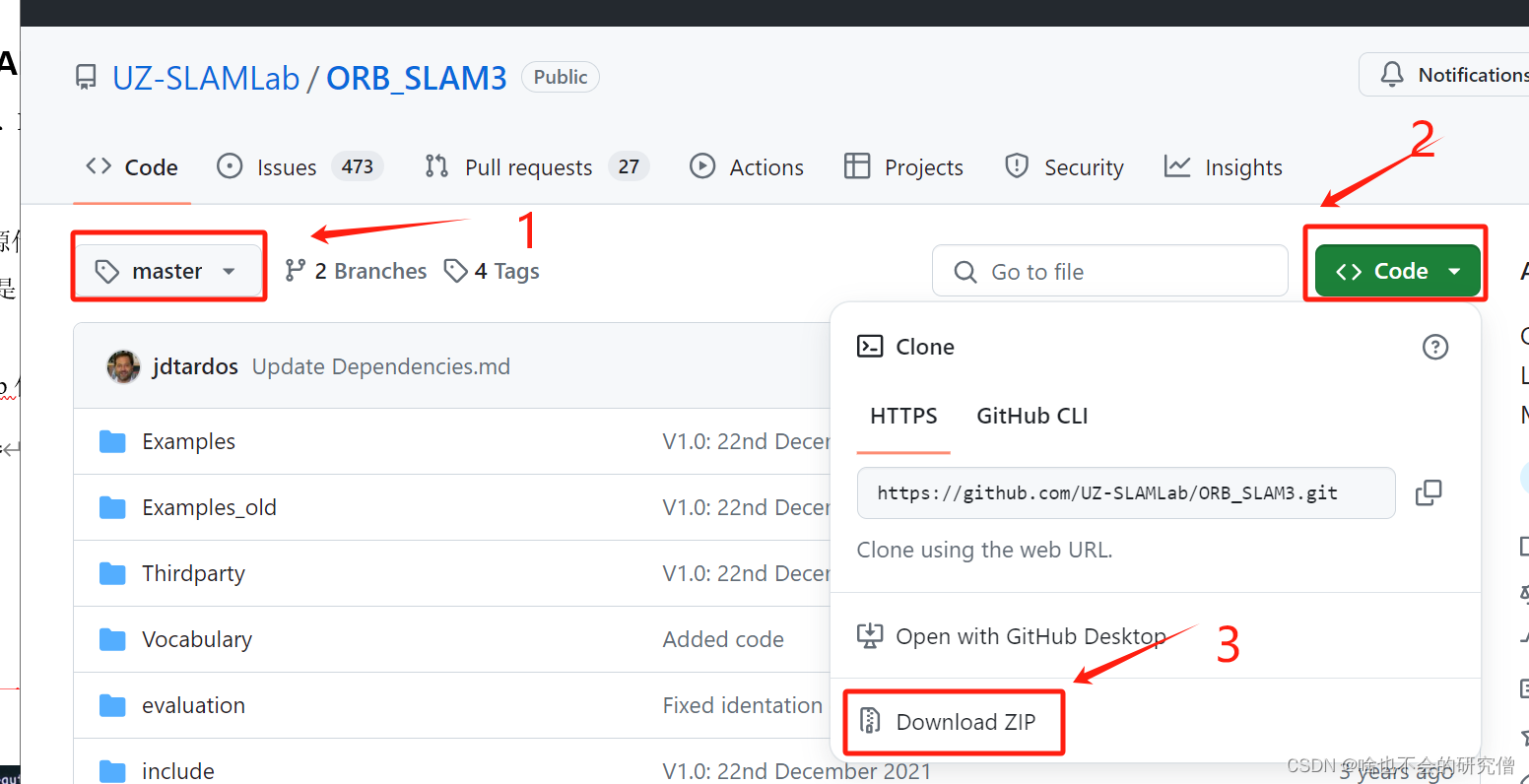
去github下载的代码,建议可以复制github代码连接的URL,从码云(gitee)上导入下载,下载快些。
二、安装支持C++特性依赖
终端输入:
sudo apt-get install gcc
sudo apt-get install g++
sudo apt-get install build-essential
sudo apt-get install cmake
sudo apt-get install git
三、安装Pangolin
1. 安装Pangolin的依赖
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
sudo apt install libpython2.7-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
2. 下载编译
注意:下载0.6版本安装即可,一定不要安装最新版的Pangolin!!!!
不然运行./buil_ros.sh时出现如下错误:
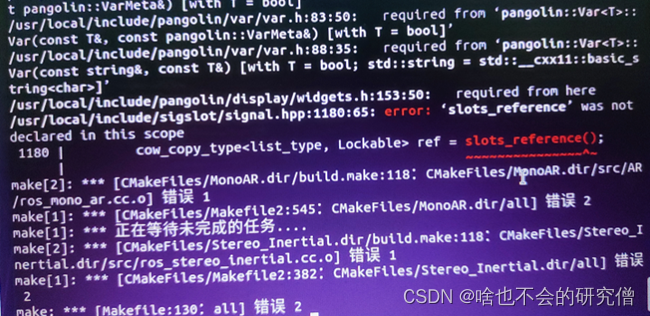
解决:
卸载重装,不然要改很多源代码
在Pangolin/build目录下打开终端:sudo apt uninstall ,然后删除Panglion文件夹即可。
(1)下载源码
下载地址:https://github.com/stevenlovegrove/Pangolin
(2)编译安装
进入Pangolin目录下,创建build:
mkdir build
cd build
编译源码:
cmake ..
make
安装到本机:
sudo make install
(3)检查是否安装成功
cd  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2922
2922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











