







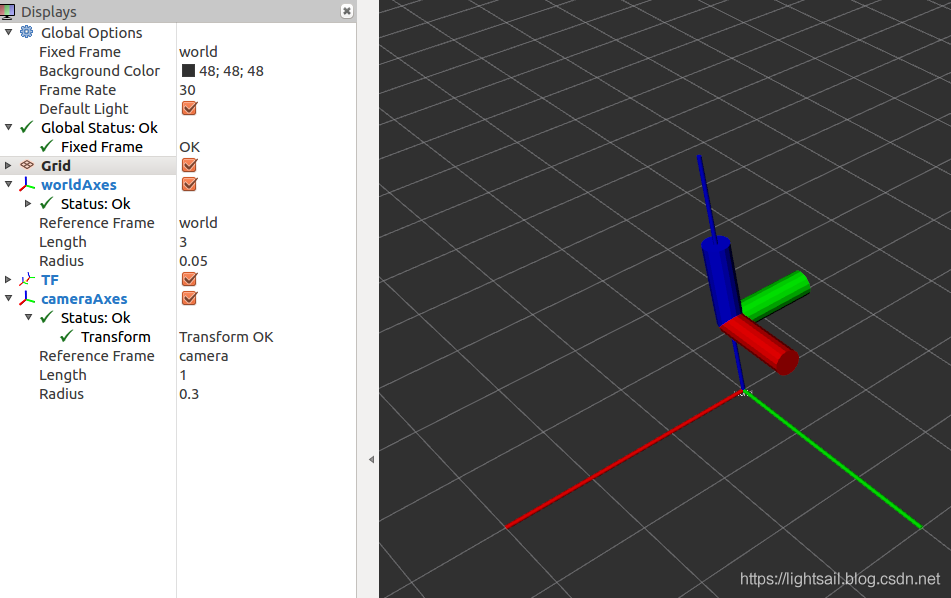
RVIZ坐标系
X轴--红色 Y轴---绿色 Z轴---蓝色
YAW(偏航角)绕Z轴旋转
PITCH(俯仰角)绕Y轴旋转
ROLL(滚转角)绕X轴旋转
符合右手坐标系原则
利用TF进行坐标系转换
采用以下指令进行转换,其中frame_id child_frame_id 为两个坐标系的名称,通过以下命令可以确定两者的关系
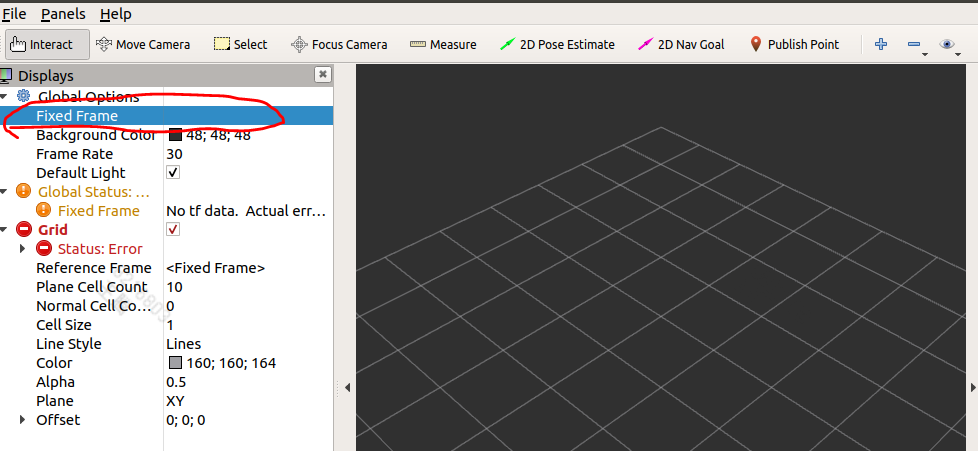
rosrun tf static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_im_ms通过在RVIZ中更改“Fixed Frame”可以选择相应坐标系,并且可以避免以下错误“For frame [xxx1]: No transform to fixed frame [xxx2]. ”


















 669
669

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









