







依旧感谢:
218rosbag_Python_写-ROS常用组件_哔哩哔哩_bilibili
5.3rqt
在ROS中,提供了rqt工具箱,调用rqt工具可以以图形化操作代替了命令操作,应用更便利。
因为ROS基于QT框架开发出来了很多图像可视化工具,整合起来就是rqt
5.3.1 rqt
ROS以中许多节点二复杂,为了理清楚这些节点和节点之间话题,以及操作节点信息之间的发布与通讯,ROS可以在rqt中操作。
1.一般来说是默认安装的
也可以手动安装
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins2.启动
在roscore下输入
rqt
或者是
rosrun rqt_gui rqt_gui
3.配置点击如下的按钮就行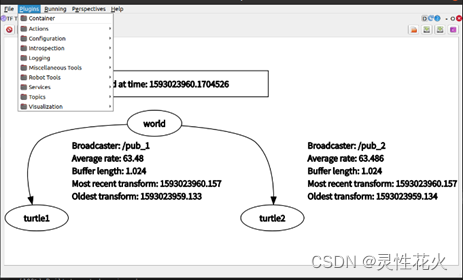
其中可以添加节点信息
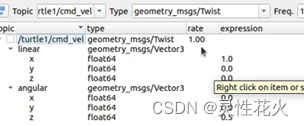
当然还可以通过选择节点信息来实现发布信息之类的操作(有点类似于仿真)(记得勾选框才能发布)
5.3.2 rqt_graph
为了查看节点、话题消息的关系,可以使用rqt下的graph
可以在 rqt 的 plugins 中添加,或者在终端使用rqt_graph启动
这个是简单介绍消息发布,或者话题之间的关系
5.3.3rqt_console
可以在 rqt 的 plugins 中添加,或者使用rqt_console启动
这个功能主要是实现日志的接受
目前已知可以接受到这些信息
ROS_DEBUG("Debug message d");
ROS_INFO("Info message oooooooooooooo");
ROS_WARN("Warn message wwwww");
ROS_ERROR("Erroe message EEEEEEEEEEEEEEEEEEEE");
ROS_FATAL("Fatal message FFFFFFFFFFFFFFFFFFFFFFFFFFFFF");
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









