






最近在找工作,简单整理一下自己学的惯性导航的知识点
目录
部分材料源于
武汉大学研究生组合导航课程合集【2022年春】_哔哩哔哩_bilibili
1导航的需求
惯性导航有很多优势,比方说纯自主性,不受外界干扰等等,由于篇幅的限制这里就不细说了。
1.1导航状态量
我们想使用惯性测量元件实现导航的需求,首先我们需要明白需要获取哪些变量:
位置、速度、姿态
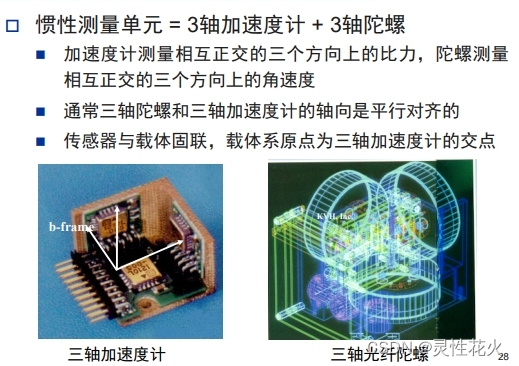
惯性原件中核心的就是两个器件——陀螺仪和加速度计,为了测量上下左右前后6个方向,一共有三组这样的设备
可以简单的认为——陀螺仪测量旋转角度、加速度计一、二次积分后能够得到位置信息(当然这样理解是错的、但先这样理解)
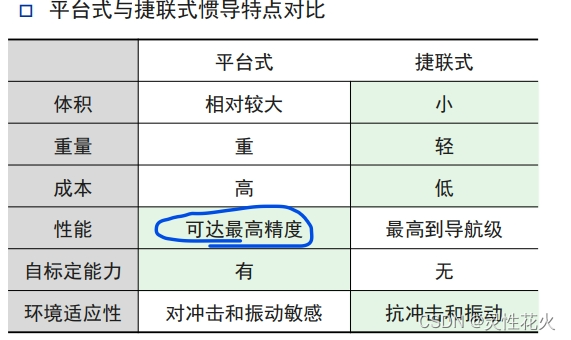
由于目前接触是捷联,那就具体谈谈捷联(没有平台,上面的器件直接固定在导航体上)
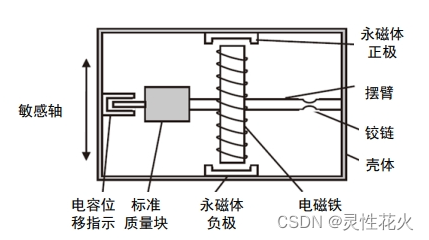
1.2加速度计
扣除重力加速度后的状态我们叫做比力,用比力信息(以下的参数均是三维向量形式)
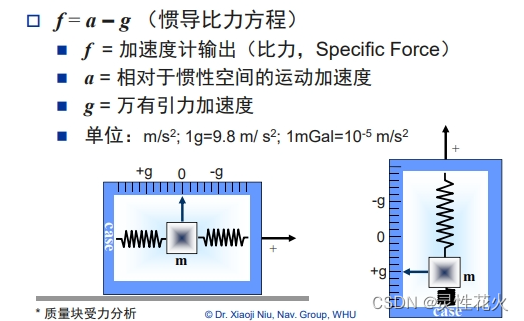
有三个相互垂直的这样原件就能够测量各个方向的运动变化了(运动变化就会产生a)
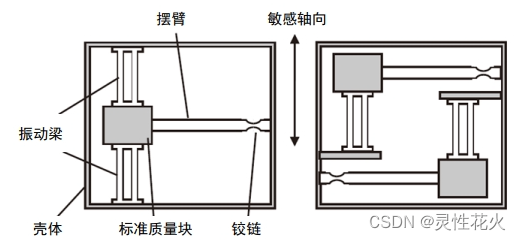
目前接触比较多的就是MEMS加速度计、摆式加速度计、振梁式加速度计
1.3陀螺仪
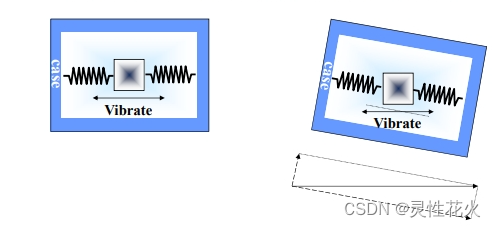
陀螺仪难以理解的是采用哥式效应,当外壳发生转动时,振动质量块会产生哥氏加速度,通 过检测哥氏加速度就可以间接测量壳体的角运动。(你就可以简单的理解式角加速度,积分就是旋转的角度)
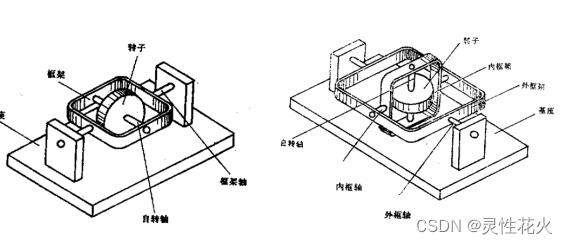
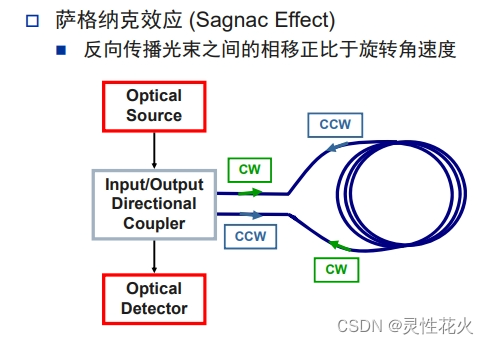
目前比较火热的式光线陀螺,普通陀螺是哥式效应来输出角度变化,光纤陀螺采用的是萨格纳克效应 (Sagnac Effect)来输出角度变化
1.4名称
注意一些专业术语
ISA:能够输出三轴陀螺仪与加速度计输出的原始数据的系统
IMU:能够输出原始数据经过标定补偿(零偏和比例因子)后的数据的系统
INS:能够经过补偿后的数据经过导航算法(机械编排)输出导航状态量的系统
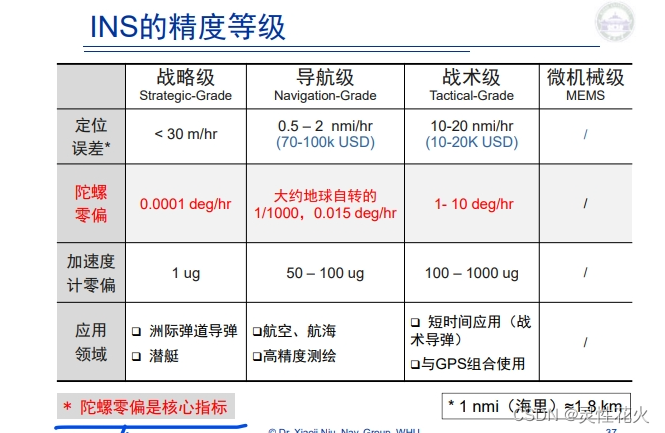
1.5指标
2误差与标定
2.1前置学习
前置学习:常用坐标系——实用惯性坐标系(i)、地心地固坐标系 (e)、导航坐标系(n)、IMU坐标系(b)
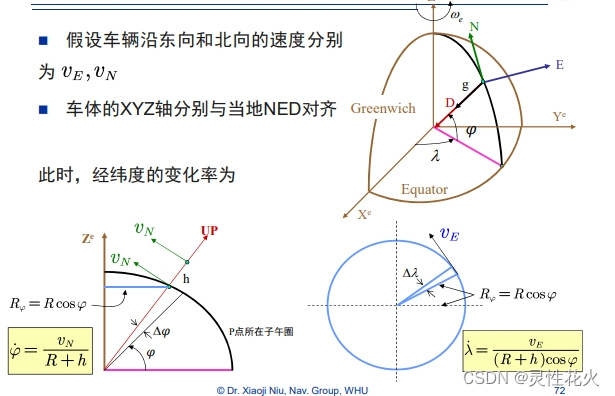
器件运动,随地球上运动的位置(经纬度)变化(一般不研究垂直方向):
2.2误差的建模
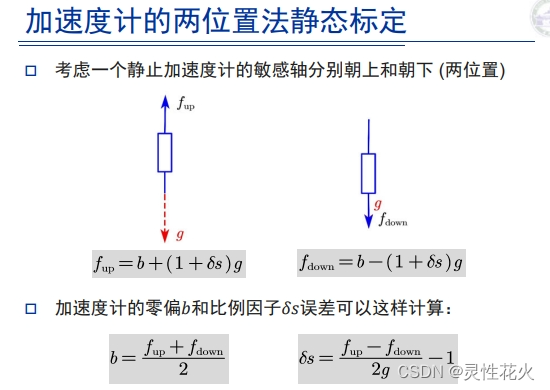
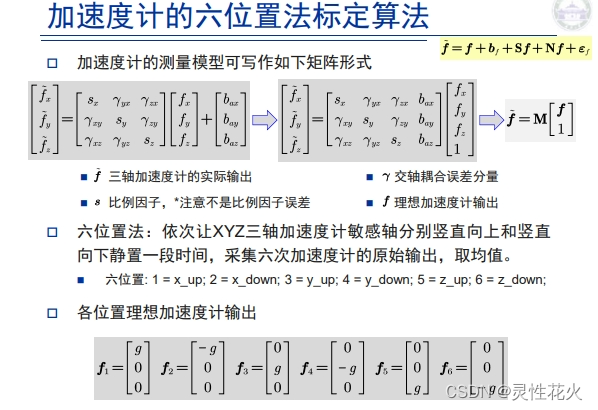
2.3标定(静态)
加速度计静止不动,由两位置标定到六位置标定,燃后补偿常值误差
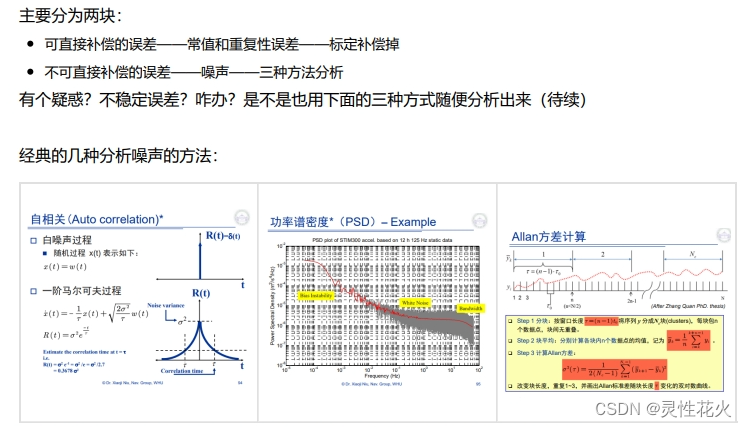
陀螺仪静止不动,每隔一段时间记录数据,参考:
IMU标定之---Allan方差_allan方差图_敢敢のwings的博客-优快云博客
可以获取五种关于陀螺仪的误差
2.4静态粗对准
原理 加速度计水平姿态角 陀螺仪对准
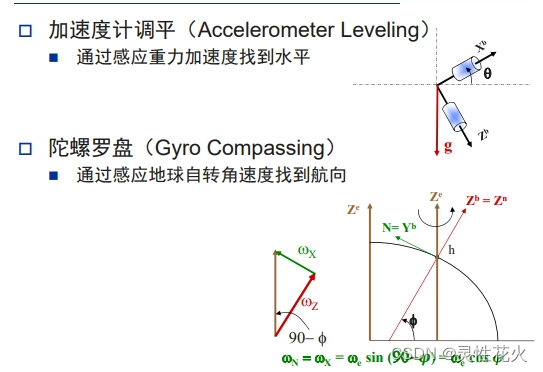
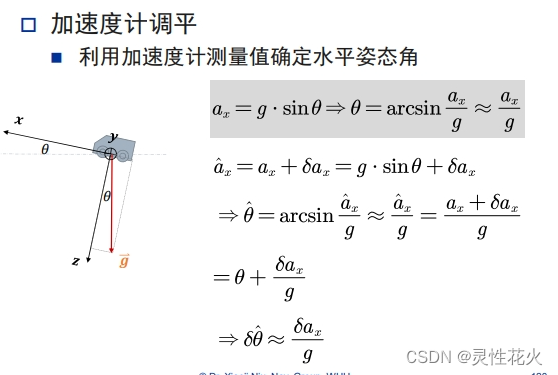
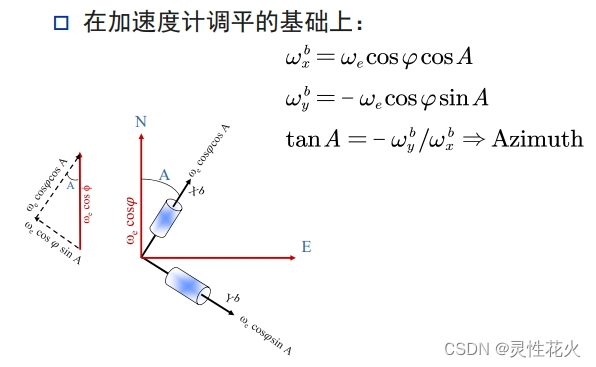
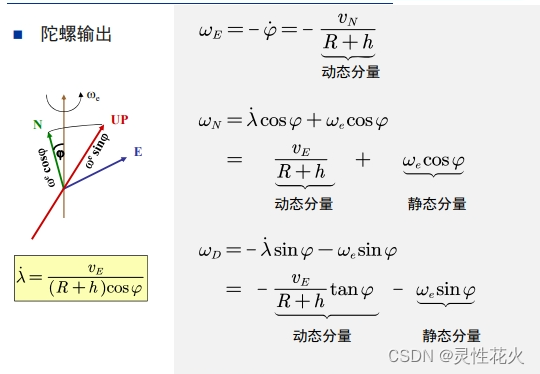
加速度计对准后只输出加速度g,高精度陀螺仪能够输出图片中的数据。但是!有些低精度的陀螺仪不敏感地球旋转,没有上面输出,而是0,这个时候,由于加速度计能够直接对准水平,但是航向角度是无法确定的(绕Z旋转是没什么问题的,所以一般还需要其他的方法(比方说磁力计))
粗对准一般研究姿态是足够了,但是如果用在导航上就显得不够了,所以还需要精对准。
3INS的机械编排
这里的机械编排其实就是如何使用陀螺仪还有加速度计的方法,简单来说用陀螺仪计算姿态矩阵,燃后利用姿态矩阵将三轴比例信息换算到对应坐标系中。
按照这个理念,就有以下的计算过程:
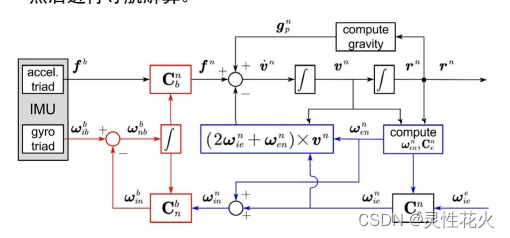
这里简单的说一下具体的步骤:经过
3.1表示姿态的几种方法
姿态角(Euler角):将姿态表示为三个角度,通常为俯仰角、横滚角和航向角。
四元数(Quaternion):用四元数来描述姿态,通常包含一个实部和三个虚部。
矩阵(Matrix):将姿态表示为一个旋转矩阵,通常为3x3的矩阵。
轴角(Axis-angle):将姿态表示为一个旋转轴和角度,通常用一个三维向量表示旋转轴,并用一个标量表示旋转角度。
旋转向量(Rotation vector):将姿态表示为一个旋转轴和角度,通常用一个三维向量表示旋转轴,并用一个标量表示旋转角度。
其他方法:还有一些其他方法来描述姿态,如欧拉参数(Euler parameters)、方向余弦(Direction Cosine)等。
上面几种方法在表示姿态时可能会遇到以下问题:
欧拉角和角度难以理解:欧拉角和角度的表示方法需要对三个轴的旋转顺序有深入的了解,较难理解和记忆。
欧拉角的万向锁问题:当某个轴旋转到与另一个轴重合时,会导致欧拉角的一种情况出现万向锁问题,使得姿态表示出现问题。
四元数的计算复杂:四元数的计算相对比较复杂,需要使用特定的算法才能进行计算。
矩阵的计算复杂:旋转矩阵需要进行较为繁琐的矩阵运算,对于计算资源限制的嵌入式系统可能不太适用。
一般采用的是四元素,在计算资源可用的环境下使用的是旋转矩阵
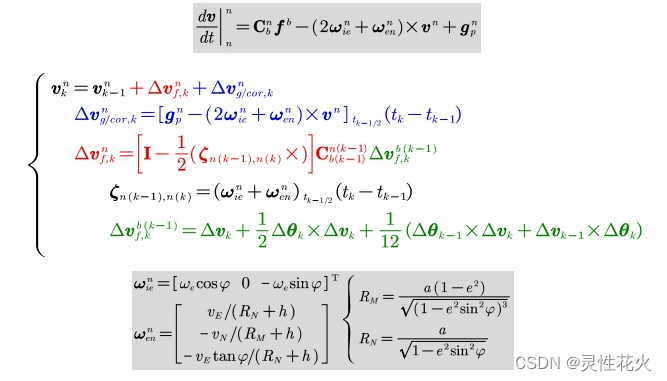
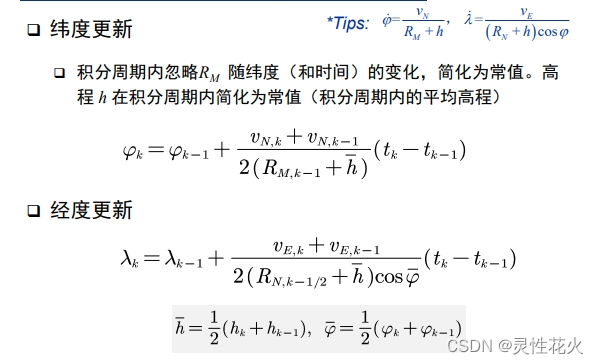
3.2导航数据推算结果
上面分析旋转矩阵是一个非常复杂的国过程,可以说高低精度就是这里有很大的差别,这里不做具体介绍很烧脑,最后给出ppt中结果
4误差分析
惯导好是好但是累计误差会让人疯,所以高精度的惯性导航一般是建模非常的精致(甚至展开到泰勒五阶)
有的时候误差不是不能接受,我们想要将运动过程的导航参数量的误差接近0,就需要建立误差模型:
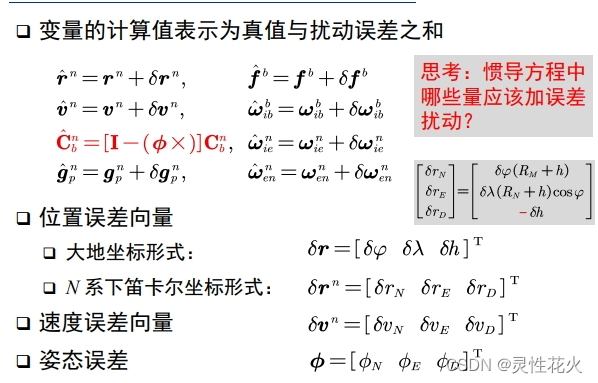
纯高精度惯导想压低成本只能建立更加准确的模型,使用昂贵的器件,所以对于民用的,还是建议使用组合导航。

















 6536
6536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









