







T型曲线中,关节的位置曲线和速度曲线连续,加速度曲线不连续且在拐角处较为粗糙不够平滑,在速度拐点处容易引起的电机和传动系统的冲击,因此该加减速曲线常用于低速、低成本的运动控制过程。同T型速度曲线相比,S形曲线更加平滑,避免了T形曲线在速度拐点的冲击,但是在相同的期望速度和加速度条件下,运动相同距离的时间要更长一点。
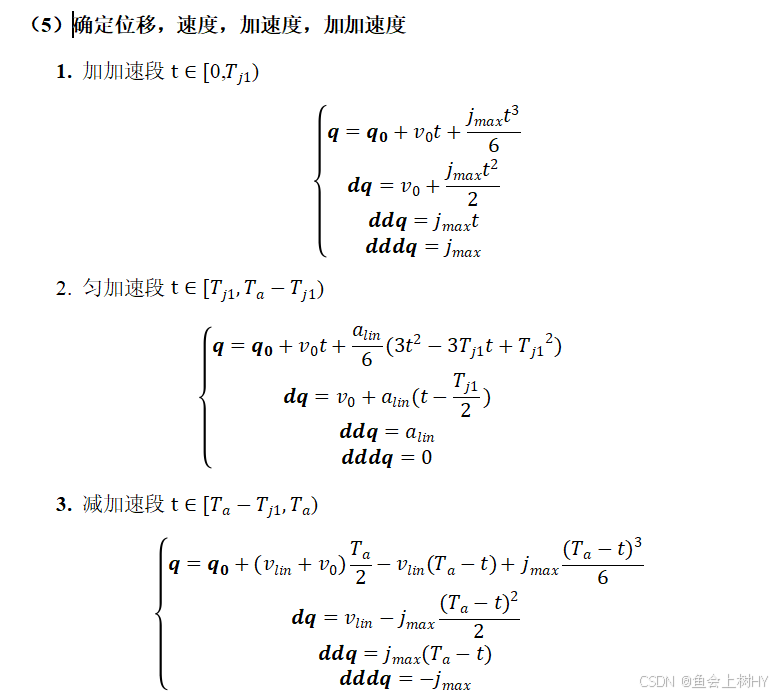
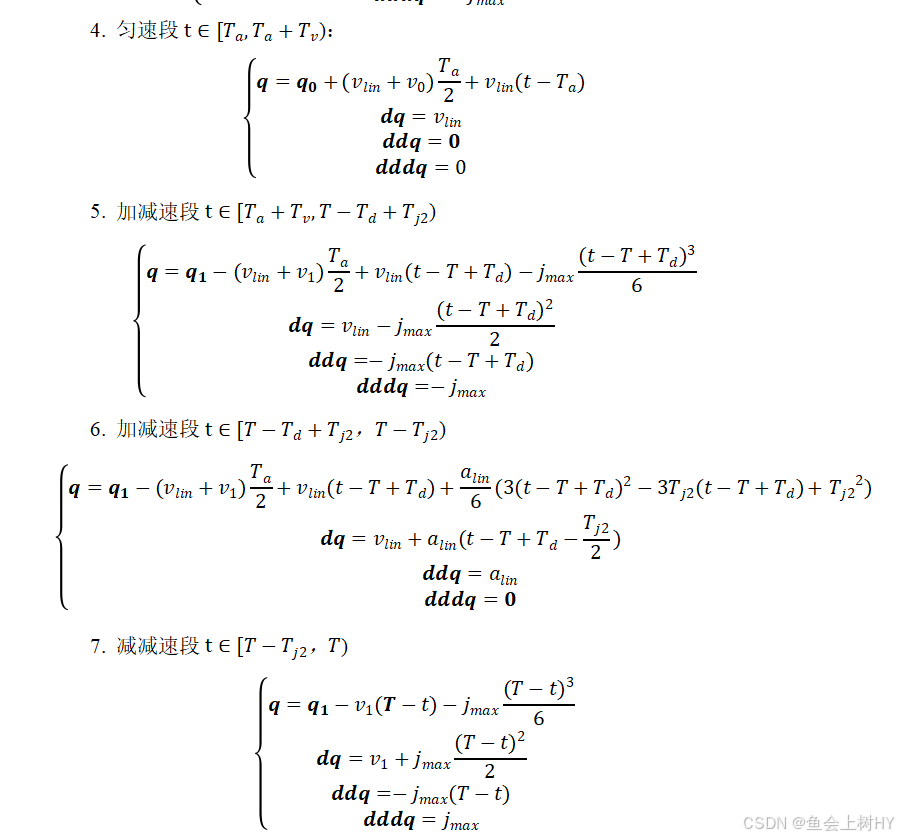
S型速度曲线一般包括加加速、匀加速、减加速、匀速、加减速、匀减速、减减速,一共7段,因此又被称为7段式曲线。下图是典型的S型曲线图。






MATLAB验证:
判断各种条件确定参数
function para = MySlinePara(q0, q1, v0, v1, vmax, amax, jmax)
% input 输入关节起始位置,起始点速度,最大速度,最大加速度,最大加加速度
% 得到规划参数Ta, Tv, Td, Tj1, Tj2, q0, q1, v0, v1, vlim, amax, amin, alima, alimd, jmax, jmin
vmin = -vmax; amin = -amax; jmin = -jmax;
% 转化得到实际的q_0、q_1、v_max、a_max
sigma = sign(q1 - q0);
q_0 = sigma*q0;
q_1 = sigma*q1;
v_0 = v0;
v_1 = v1;
v_max = ((sigma+1)/2)*vmax + ((sigma-1)/2)*vmin;
v_min = ((sigma+1)/2)*vmin + ((sigma-1)/2)*vmax;
a_max = ((sigma+1)/2)*amax + ((sigma-1)/2)*amin;
a_min = ((sigma+1)/2)*amin + ((sigma-1)/2)*amax;
j_max = ((sigma+1)/2)*jmax + ((sigma-1)/2)*jmin;
j_min = ((sigma+1)/2)*jmin + ((sigma-1)/2)*jmax;
% 判断是否达到最大速度
if ((v_max - v_0)*j_max < a_max^2)
Tj1 = sqrt((v_max - v_0) / j_max); % 达不到a_max
Ta = 2*Tj1;
a_lima = j_max * Tj1;
else
Tj1 = a_max / j_max; % 能够达到a_max
Ta = Tj1 + (v_max - v_0) / a_max;
a_lima = a_max;
end
if ((v_max - v_1)*j_max < a_max^2)
Tj2 = sqrt((v_max - v_1) / j_max); % 达不到a_min
Td = 2*Tj2;
a_limd = -j_max * Tj2;
else
Tj2 = a_max / j_max; % 能够达到a_min
Td = Tj2 + (v_max - v_1) / a_max;
a_limd = -a_max;
end
% 计算匀速段时间
Tv = (q_1 - q_0)/v_max - (Ta/2)*(1 + v_0/v_max) - (Td/2)*(1 + v_1/v_max);
% 对Tv进行讨论
if (Tv > 0)
% 达到最大速度v_max,即存在匀速阶段
vlim = v_max;
T = Ta + Tv + Td;
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
else
% 达不到最大速度,即匀速阶段Tv=0
% 假设最大加速度和最小加速度均能达到
Tv = 0;
Tj = a_max / j_max;
Tj1 = Tj;
Tj2 = Tj;
delta = (a_max^4/j_max^2) + 2*(v_0^2 + v_1^2) + a_max*(4*(q_1 - q_0) - 2*(a_max/j_max)*(v_0 + v_1));
Ta = ((power(a_max, 2)/j_max) - 2.0*v_0 + sqrt(delta)) / (2.0*a_max);
Td = ((power(a_max, 2)/j_max) - 2.0*v_1 + sqrt(delta)) / (2.0*a_max);
% 对Ta和Td进行讨论
if (Ta < 0 || Td < 0)
if (Ta < 0)
% 没有加速段,只有减速段
Ta = 0; Tj1 = 0;
Td = 2*(q_1 - q_0) / (v_0 + v_1);
Tj2 = (j_max*(q_1 - q_0) - sqrt(j_max*(j_max*power(q_1 - q_0, 2) + power(v_1 + v_0, 2)*(v_1 - v_0)))) / (j_max*(v_1 + v_0));
a_lima = 0;
a_limd = -j_max*Tj2;
vlim = v_0;
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
elseif (Td < 0)
% 没有减速段,只有加速段
Td = 0; Tj2 = 0;
Ta = 2*(q_1 - q_0) / (v_0 + v_1);
Tj1 = (j_max*(q_1 - q_0) - sqrt(j_max*(j_max*power(q_1 - q_0, 2)) - power(v_1 + v_0, 2)*(v_1 - v_0))) / (j_max*(v_1 + v_0));
a_lima = j_max*Tj1;
a_limd = 0;
vlim = v_0 + a_lima*(Ta - Tj1);
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
end
elseif (Ta >= 2*Tj && Td >= 2*Tj)
% 加速段和减速段都能达到最大加速度
a_lima = a_max;
a_limd = -a_max;
vlim = v_0 + a_lima*(Ta - Tj);
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
else
% 加速和减速阶段至少有一段不能达到最大加速度
lambda = 0.99; % 系统取0<lambda<1
while (Ta < 2*Tj || Td < 2*Tj)
% 循环
a_max = lambda*a_max;
Tv = 0;
Tj = a_max / j_max;
Tj1 = Tj;
Tj2 = Tj;
delta = (a_max^4/j_max^2) + 2*(v_0^2 + v_1^2) + a_max*(4*(q_1 - q_0) - 2*(a_max/j_max)*(v_0 + v_1));
Ta = ((power(a_max, 2)/j_max) - 2.0*v_0 + sqrt(delta)) / (2.0*a_max);
Td = ((power(a_max, 2)/j_max) - 2.0*v_1 + sqrt(delta)) / (2.0*a_max);
if (Ta < 0 || Td < 0)
if (Ta < 0)
% 没有加速段,只有减速段
Ta = 0; Tj1 = 0;
Td = 2*(q_1 - q_0) / (v_0 + v_1);
Tj2 = (j_max*(q_1 - q_0) - sqrt(j_max*(j_max*power(q_1 - q_0, 2) + power(v_1 + v_0, 2)*(v_1 - v_0)))) / (j_max*(v_1 + v_0));
a_lima = 0;
a_limd = -j_max*Tj2;
vlim = v_0;
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
elseif (Td < 0)
% 没有减速段,只有加速段
Td = 0; Tj2 = 0;
Ta = 2*(q_1 - q_0) / (v_0 + v_1);
Tj1 = (j_max*(q_1 - q_0) - sqrt(j_max*(j_max*power(q_1 - q_0, 2)) - power(v_1 + v_0, 2)*(v_1 - v_0))) / (j_max*(v_1 + v_0));
a_lima = j_max*Tj1;
a_limd = 0;
vlim = v_0 + a_lima*(Ta - Tj1);
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
end
elseif (Ta >= 2*Tj && Td >= 2*Tj)
% 加速段和减速段都能达到最大加速度
a_lima = a_max;
a_limd = -a_max;
vlim = v_0 + a_lima*(Ta - Tj);
para = [Ta, Tv, Td, Tj1, Tj2, q_0, q_1, v_0, v_1, vlim, a_max, a_min, a_lima, a_limd, j_max, j_min];
return;
end
end
end
end
计算位移,速度,加速度,加加速度
% 计算位移,速度,加速度,加加速度
function [time, q, qd, qdd,qddd] = compute(Ta, Tv, Td, Tj1, Tj2, q0, q1, v0, v1, vlim, amax, amin, alima, alimd, jmax, jmin,T)
i = 1;
for t = 0: 0.001: T
time(i) = 0.001*i;
% 加速段
if (t >= 0 && t < Tj1)
q(i) = q0 + v0*t + jmax*t^3/6;
qd(i) = v0 + jmax*(t^2/2);
qdd(i) = jmax*t;
qddd(i) = jmax;
elseif (t >= Tj1 && t < Ta - Tj1)
q(i) = q0 + v0*t +(alima/6)*(3*t^2 - 3*Tj1*t + Tj1^2);
qd(i) = v0 + alima*(t - Tj1/2);
qdd(i) = alima;
qddd(i) = 0;
elseif (t >= Ta - Tj1 && t < Ta)
q(i) = q0 + (vlim + v0)*(Ta/2) - vlim*(Ta - t) - jmin*((Ta - t)^3/6);
qd(i) = vlim + jmin*(power(Ta - t, 2)/2);
qdd(i) = -jmin*(Ta - t);
qddd(i) = jmin;
% 匀速段
elseif (t >= Ta && t < Ta + Tv)
q(i) = q0 + (vlim + v0)*(Ta/2) + vlim*(t - Ta);
qd(i) = vlim;
qdd(i) = 0;
qddd(i) = 0;
% 减速段
elseif (t >= Ta + Tv && t < T - Td + Tj2)
q(i) = q1 - (vlim + v1)*(Td/2) + vlim*(t - T + Td) - jmax*(power(t - T + Td, 3)/6);
qd(i) = vlim - jmax*(power(t - T + Td, 2)/2);
qdd(i) = -jmax*(t - T + Td);
qddd(i) = -jmax;
elseif (t >= T - Td + Tj2 && t < T - Tj2)
q(i) = q1 - (vlim + v1)*(Td/2) + vlim*(t - T + Td) + (alimd/6)*(3*power(t - T + Td, 2) - 3*Tj2*(t - T + Td) + Tj2^2);
qd(i) = vlim + alimd*(t - T + Td - Tj2/2);
qdd(i) = alimd;
qddd(i) = 0;
elseif (t >= T - Tj2 && t <= T)
q(i) = q1 - v1*(T - t) - jmax*(power(T - t, 3)/6);
qd(i) = v1 + jmax*(power(t - T, 2)/2);
qdd(i) = -jmax*(T - t);
qddd(i) = jmax;
end
i = i + 1;
end
end
测试代码
clc
clear;
% S曲线规划
% 边界条件
q0 = 0; q1 = 100;
v0 = 0; v1 = 0;
vmax = 10; amax = 10; jmax = 30;
sigma = sign(q1 - q0);
% 得到规划参数Ta, Tv, Td, Tj1, Tj2, q0, q1, v0, v1, vlim, amax, amin, alima, alimd, jmax, jmin
para = MySlinePara(q0, q1, v0, v1, vmax, amax, jmax)
T = para(1) + para(2) + para(3);
[time, q, qd, qdd,qddd] = compute( para(1), para(2), para(3), para(4), para(5), para(6), para(7), para(8), para(9), para(10), para(11), para(12), para(13), para(14), para(15), para(16),T);
figure(1)
subplot(5,1,1)
plot(time, q, 'r', 'LineWidth', 1.5)
grid on;xlabel('time[s]');ylabel('position[mm]');
subplot(5,1,2)
plot(time, qd, 'b', 'LineWidth', 1.5)
grid on;xlabel('time[s]');ylabel('speed[mm/s]');
subplot(5,1,3)
plot(time, qdd, 'g', 'LineWidth', 1.5)
grid on;xlabel('time[s]');ylabel('acceleration[mm/s2]');
subplot(5,1,4)
plot(time, qddd, 'LineWidth', 1.5)
grid on;xlabel('time[s]');ylabel('&acceleration[mmm/s3]');测试结果验证

当关节旋转距离较短时无法达到最大速度

当距离足够短最大加速度都无法到达时

下一章:【机器人学】5-3.六自由度机器人轨迹规划-笛卡尔空间- 直线与圆弧规划【附MATLAB代码】
2024-09-12 感谢评论区的小伙伴,当初速度和末速度为负时,代码错误,现以修正。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









