







1.机器人工具箱的安装
一、下载MATLAB机器人工具箱安装包
官网下载,各种版本:
https://petercorke.com/resources/downloads/#all_0-27-wpfd-rtb
网上也有人上传了自己的百度网盘,不过还是希望直接从官网下载。
打开官网可以看到如下两个版本。
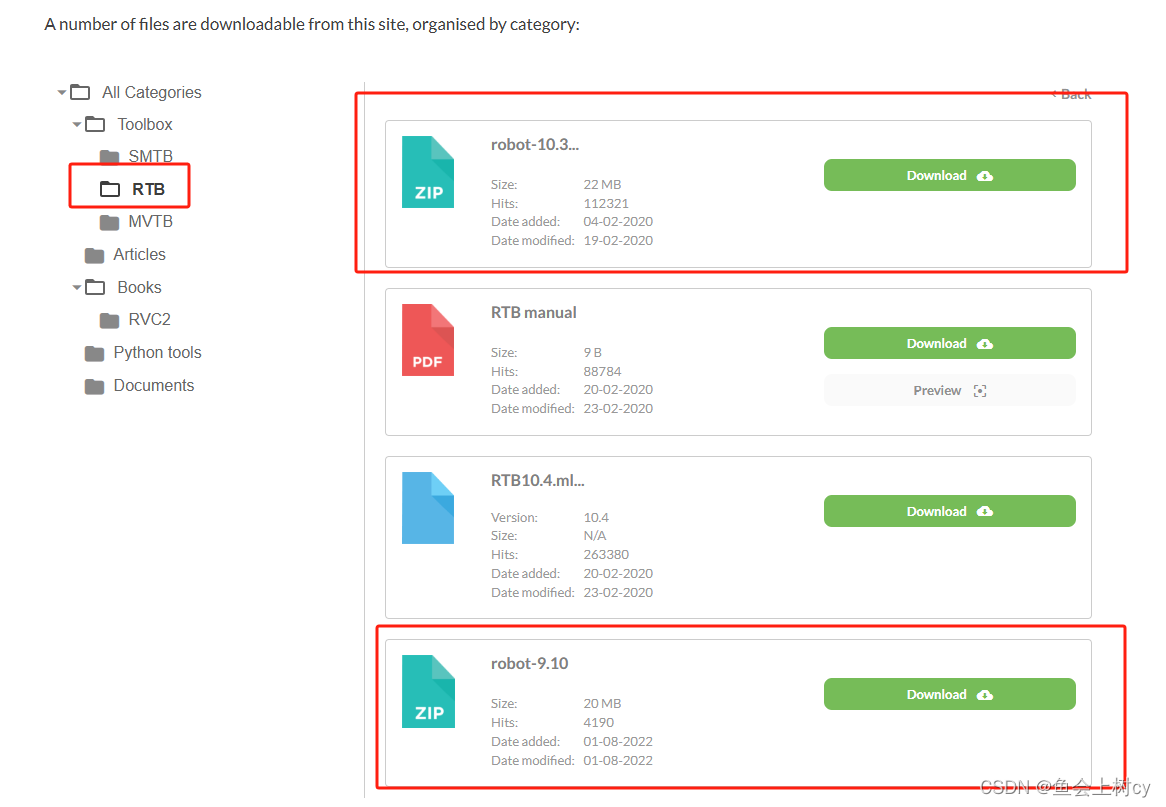
二、将文件夹放到MATLAB安装文件夹指定目录下
先将下载后的文件解压,然后将解压文件 放到MATLAB安装文件夹的\toolbox目录下。

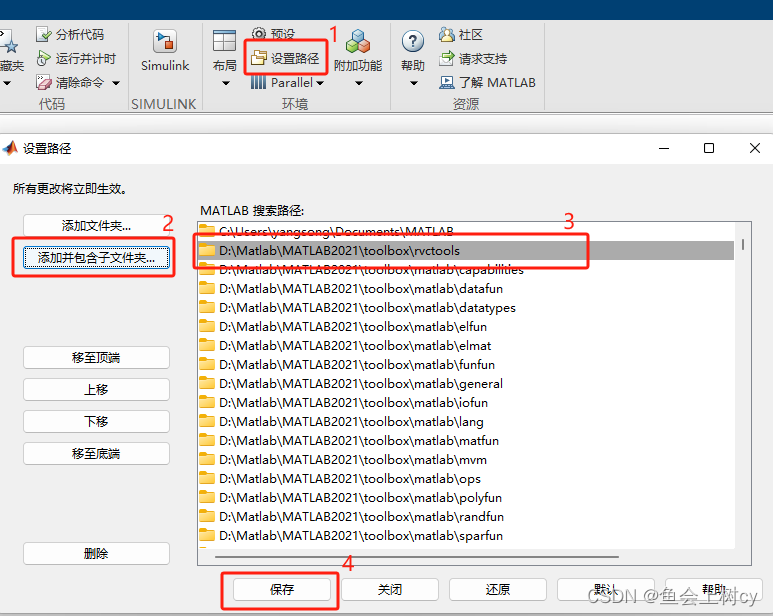
三、将该文件夹添加到路径中,操作步骤如下:
四、启动安装程序
在命令行窗口输入 startup_rvc,回车,如图,显示了一段英语,可以看到,我的版本是10.3.1。

注意,以后每次启动MATLAB都需要重新输入startup_rvc回车来启动这个工具箱。否则会报下述错误。
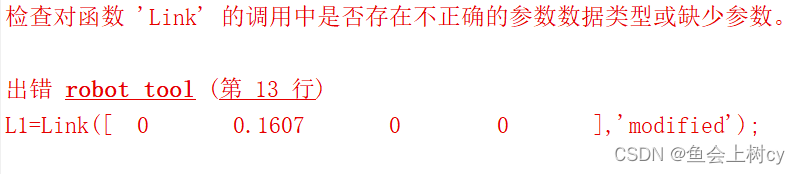
2.机器人工具箱报错解决
一、索引超出数组元素的数目(4)。
在MATLAB 2019 或者 2020 等高版本里,使用机器人工具箱(robotics toolbox/RTB)对机器人进行可视化时(如robot.teach,robot.plot)会报错:
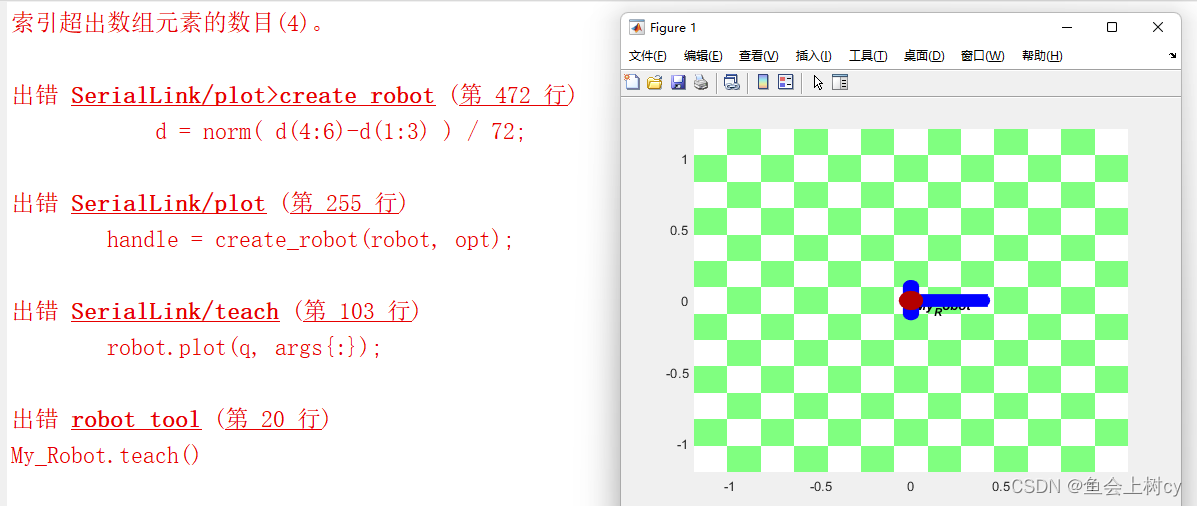
而在MATLAB 2018b及更早版本中不会报错。此时只需在可视化语句之前加上 view(3) 即可解决。

然而每次都要写这个太麻烦了,有一个一劳永逸的办法。首先在命令窗口里输入
edit SerialLink.plot 之后应该弹出
之后应该弹出
找到如下位置,添加一行 view(3) 代码

之后就不需要每次都写view(3)了,和旧版本的用法一致。
二、调用rne函数求解动力学关节力矩时报错
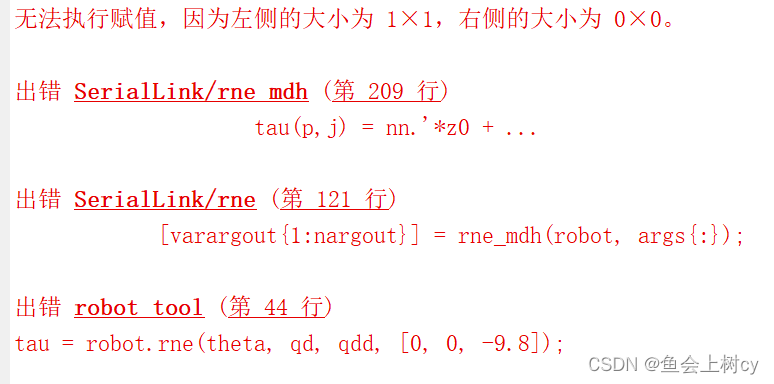
这是应为新版本的工具箱动力学仿真,需要给机器人提供Jm参数值。

提供Jm参数值后,rne函数正常运行。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









