







 超级会员免费看
超级会员免费看
UniAD是2023年由中科院和清华大学团队提出的一篇关于自主驾驶的研究论文,重点探讨了如何通过规划导向的学习框架来解决传统端到端自主驾驶中感知、预测和决策分离的问题。其主要贡献是提出了一种新的规划导向的神经网络架构,以更好地将感知、规划和控制整合在一起,从而提高端到端自主驾驶的性能和可靠性。
论文链接:https://arxiv.org/abs/2212.10156
GitHub:GitHub - OpenDriveLab/UniAD: [CVPR 2023 Best Paper Award] Planning-oriented Autonomous Driving
整个网络结构如下:
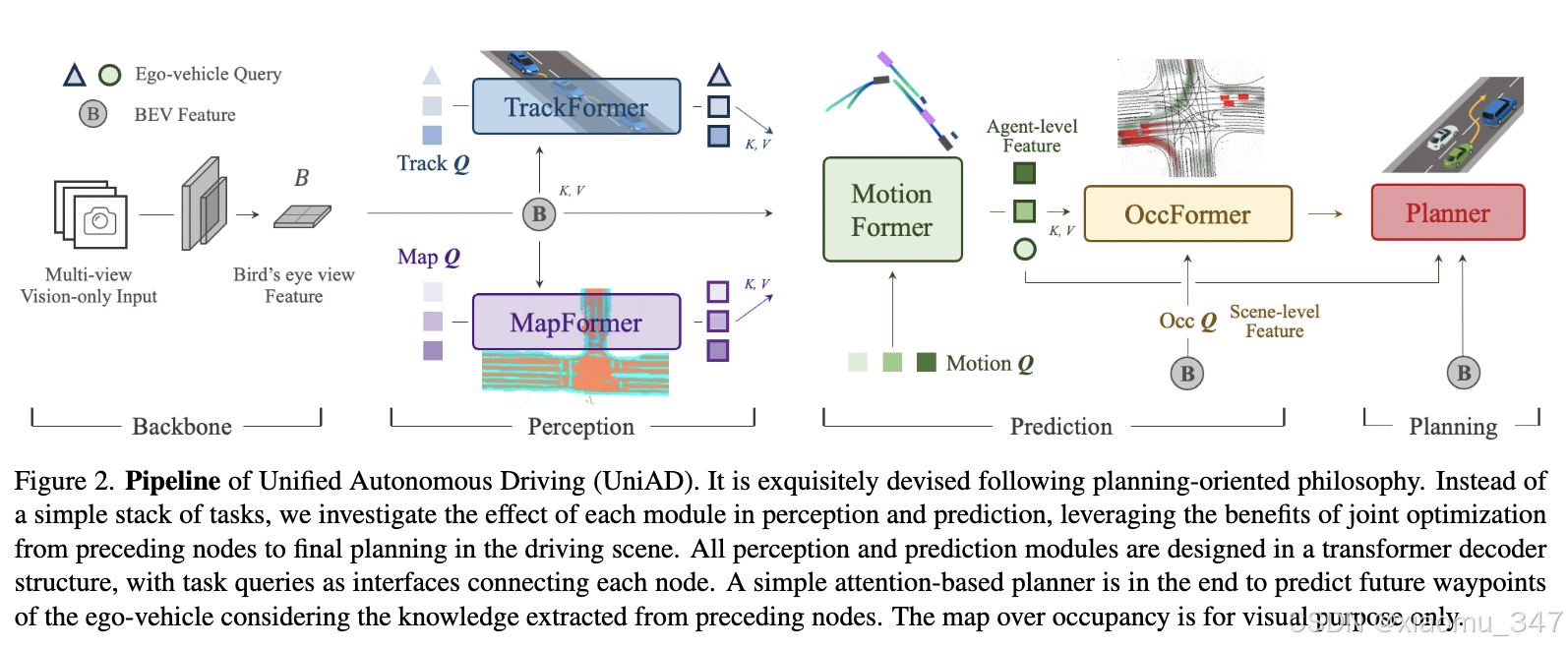
下面对真个网络结构进行详细解析&#

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1389
1389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











