




PCL专栏目录及须知
NDT同ICP一样,也是用于粗配准后的精配准。
1.NDT原理
将目标点云按照固定的分辨率划分成3d网格,并计算出每个3d网格点云的分布情况。然后计算源点云在目标点云3d网格分布的概率,以确定两点云之间的匹配关系。
(1)将目标点云按照输入的分辨率划分到3d网格中,并计算每个网格的均值与协方差。
(2)计算源点云中的每个点落在目标点云的3d网格中的哪个网格里。
(3)通过公式计算NDT代价值,确定是否收敛。
代价值公式:
(4)迭代计算最优解。
2.关键函数
(1)为More-Thuente线搜索设置最大步长
registration.setStepSize(0.1); // 为More-Thuente线搜索设置最大步长(2)设置NDT网格结构的分辨率
registration.setResolution(1.0f); // 设置NDT网格结构的分辨率(3)设置匹配迭代的最大次数
registration.setMaximumIterations(50); // 设置匹配迭代的最大次数(4)为终止条件设置最小转换差异
registration.setTransformationEpsilon(0.01); // 为终止条件设置最小转换差异3.完整代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/ndt.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
int main()
{
/****************NDT配准********************/
pcl::PointCloud<pcl::PointXYZ>::Ptr source(new pcl::PointCloud<pcl::PointXYZ>); // 源点云
pcl::PointCloud<pcl::PointXYZ>::Ptr target(new pcl::PointCloud<pcl::PointXYZ>); // 目标点云
pcl::io::loadPCDFile("D:/code/csdn/data/lidar0.pcd", *source);
pcl::io::loadPCDFile("D:/code/csdn/data/lidar1.pcd", *target);
pcl::PointCloud<pcl::PointXYZ>::Ptr result(new pcl::PointCloud<pcl::PointXYZ>); // 目标点云转换后的结果
// NDT配准
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> registration;
registration.setStepSize(0.1); // 为More-Thuente线搜索设置最大步长
registration.setResolution(1.0f); // 设置NDT网格结构的分辨率
registration.setMaximumIterations(50); // 设置匹配迭代的最大次数
registration.setInputSource(source); // 设置要配准的点云
registration.setInputTarget(target); // 设置点云配准目标
registration.setTransformationEpsilon(0.01); // 为终止条件设置最小转换差异
registration.align(*result);
std::cout << "点对匹配分数:" << registration.getFitnessScore() << std::endl;
std::cout << "刚体变换矩阵:" << registration.getFinalTransformation() << std::endl;
/****************展示********************/
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("NDT"));
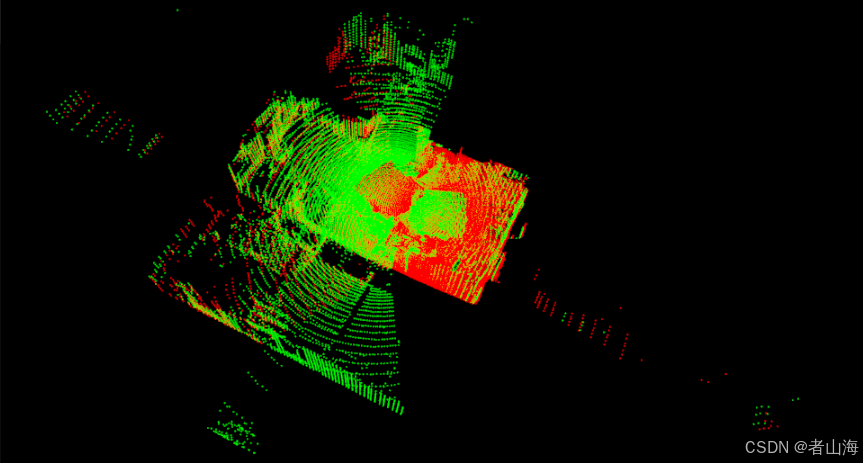
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>target_color(target, 255, 0, 0); // 目标点云
viewer->addPointCloud<pcl::PointXYZ>(target, target_color, "target cloud");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>result_color(result, 0, 255, 0); // 配准结果点云
viewer->addPointCloud<pcl::PointXYZ>(result, result_color, "result cloud");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return (0);
}
4.结果展示

















 368
368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









