






目录
一、服务通信原理
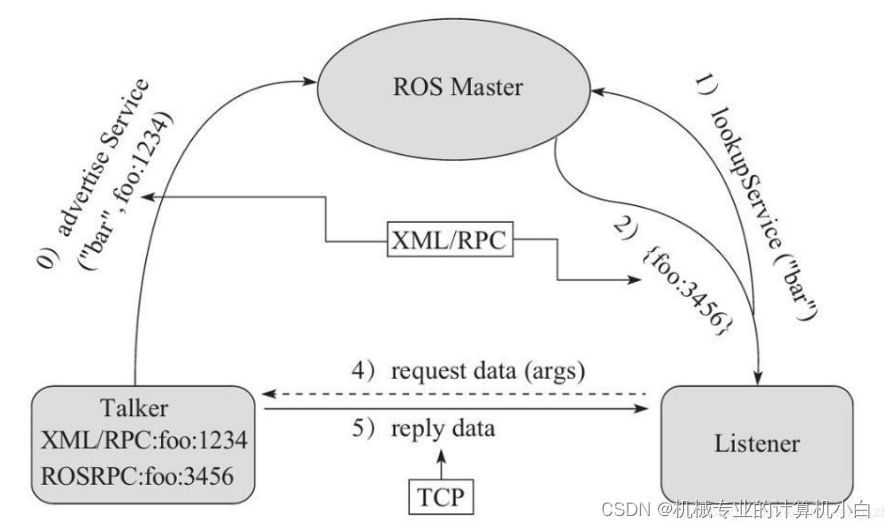
服务通信原理图,在好多细节上与话题通信不同,需要注意。
 区别:ROS机器人开发实践P20
区别:ROS机器人开发实践P20
| 话题 | 服务 | |
| 同步性 | 异步 | 同步 |
| 通信类型 | 发布者/订阅者 | 客户端/服务端 |
| 反馈 | 无 | 有 |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多 |
| 适用场景 | 数据传输 | 逻辑处理 |
其中更多的细节还需在编写代码中观察。

目录
服务通信原理图,在好多细节上与话题通信不同,需要注意。
区别:ROS机器人开发实践P20
| 话题 | 服务 | |
| 同步性 | 异步 | 同步 |
| 通信类型 | 发布者/订阅者 | 客户端/服务端 |
| 反馈 | 无 | 有 |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多 |
| 适用场景 | 数据传输 | 逻辑处理 |
其中更多的细节还需在编写代码中观察。
 1597
363
3204
1267
1654
1597
363
3204
1267
1654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























