




第 10 课 服务数据的自定义与使用
1.自定义服务数据
注意:在自定义服务数据之前,需要先创建工作空间和功能包,具体操作过程可前往目录“第4课 创建工作空间与功能包”查看文档。
自定义服务数据的具体操作步骤如下:
- 打开命令行终端。
- 输入进入功能包所在目录的指令“roscd beginner_hiwonder”,并按下回车。

注意:若出现提示“No such package/stack ‘beginner_hiwonder’”,即功能包不存在于环境变量 ROS_PACKAGE_PATH 中,具体解决方法可前往目录“第 4 课 创建工作空间与功能包”查看文档,解决此问题后,请重复一次当前步骤的操作。
- 输入指令“mkdir srv”,并按下回车,新建用于存放文本文件的文件夹“srv”。

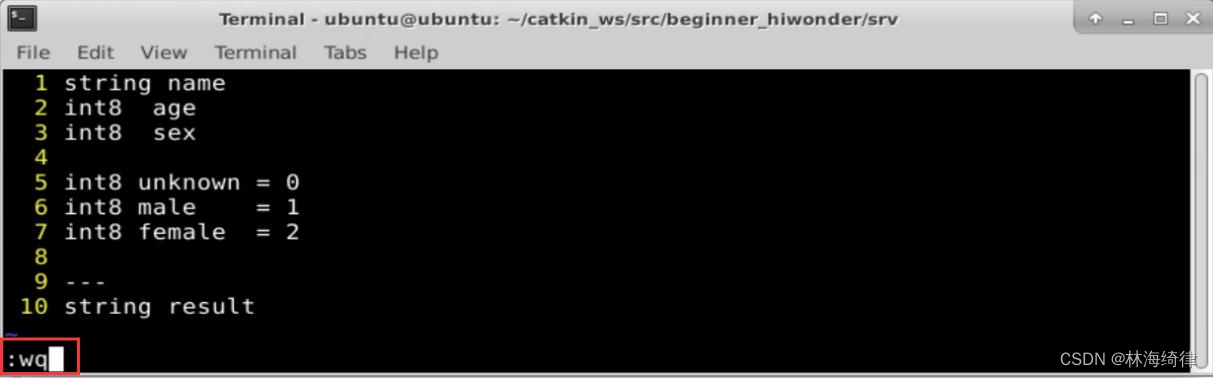
- 输入指令“vi Person.srv”编辑程序,复制下面程序。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

string name
int8 age
int8 sex
int8 unknown = 0
int8 male = 1
int8 female = 2
---
string result
5) 输入“cd ~/catkin_ws/src/beginner_hiwonder/”,按下回车。

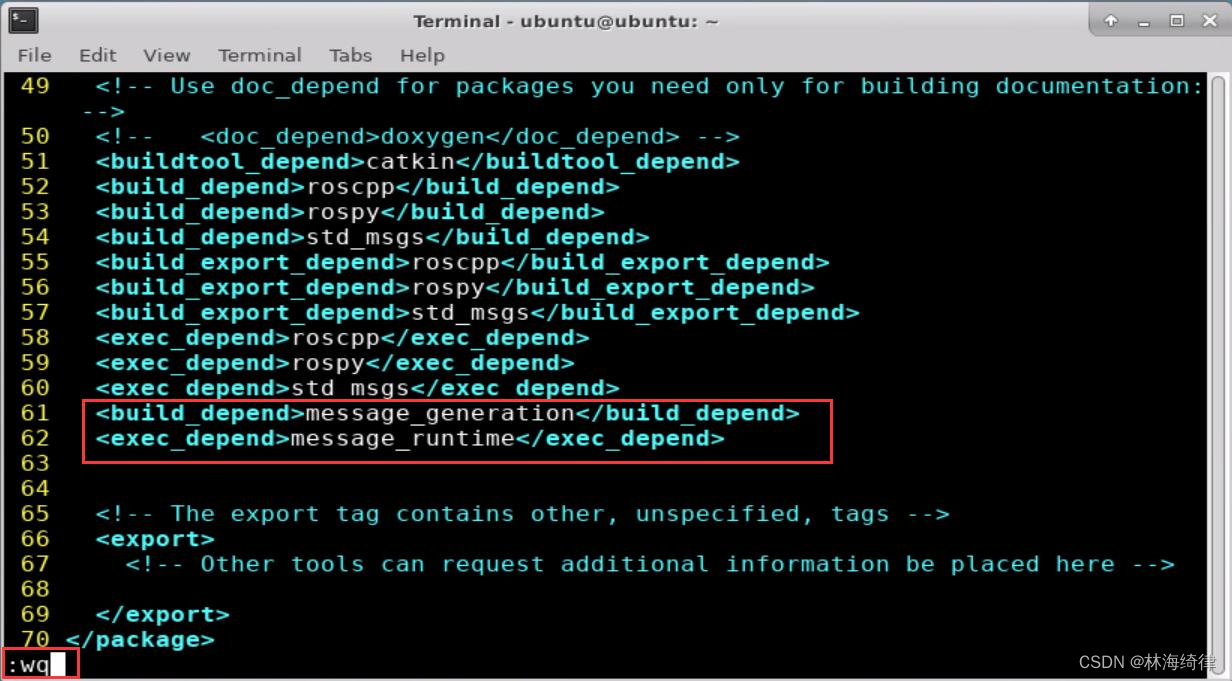
6) 输入“vi package.xml”,复制下面程序,在下图所示位置添加功能包依赖。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
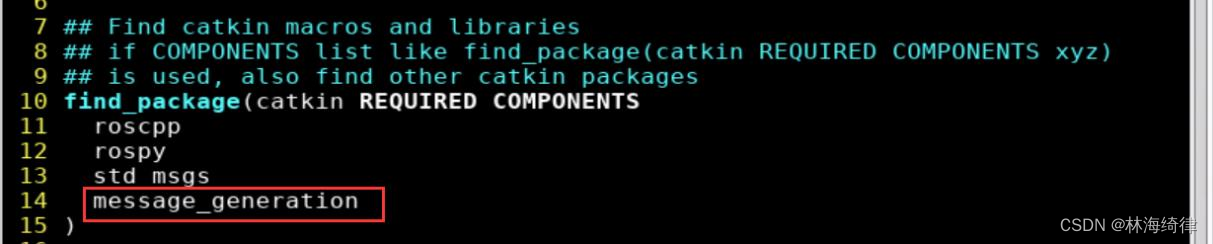
7) 输入“vi CMakeLists.txt”,再按下“i”,修改“CMakeLists.txt”文件。

8) 在下图所示位置添加所需的编译选项“message_generation”。
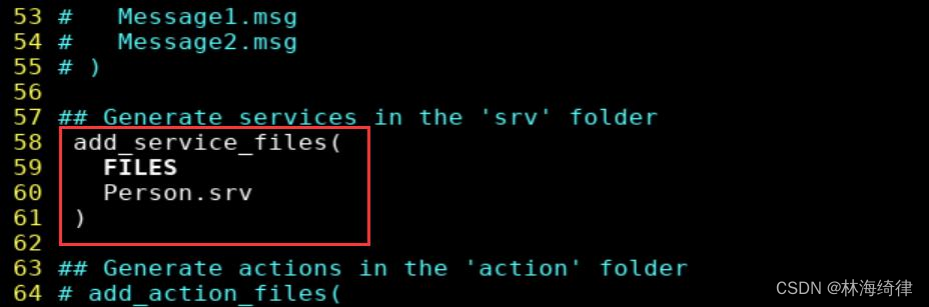
9) 找到下图所示代码,将红框部分进行反注释,并添加所需的编译选项“Person.srv”。
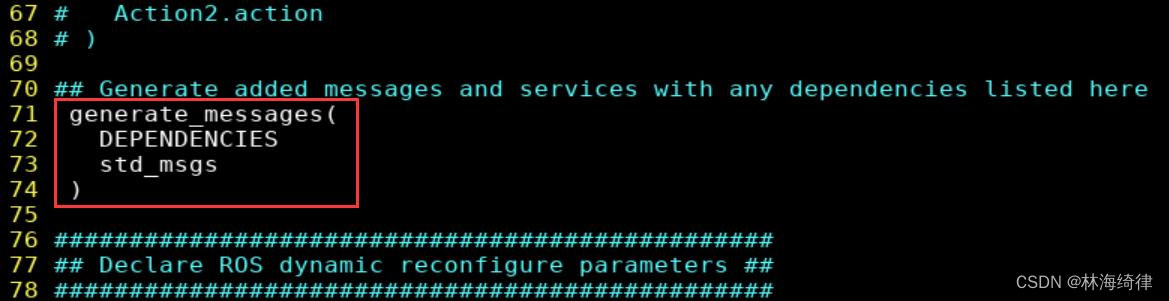
10) 找到下图所示代码,将红框部分进行反注释,确保所需的编译选项生效。
11) 找 到 下 图 所 示 代 码 , 将 红 框 部 分 进 行 反 注 释 , 并 添 加 所 需 的 编 译 选 项“message_runtime”。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 405
405

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











