







 本文详细解读LeGO-LOAM中featureAssociation.cpp的代码,涉及特征关联、点云处理、IMU数据处理等功能。介绍了点云坐标变换、加速度处理、特征抽取、光滑性计算等关键步骤,旨在帮助读者理解LeGO-LOAM的优化建图原理。
本文详细解读LeGO-LOAM中featureAssociation.cpp的代码,涉及特征关联、点云处理、IMU数据处理等功能。介绍了点云坐标变换、加速度处理、特征抽取、光滑性计算等关键步骤,旨在帮助读者理解LeGO-LOAM的优化建图原理。
LeGO-LOAM是一种在LOAM之上进行改进的激光雷达建图方法,建图效果比LOAM要好,但是建图较为稀疏,计算量也更小了。
本文原地址:wykxwyc的博客
github注释后LeGO-LOAM源码:LeGO-LOAM_NOTED
关于代码的详细理解,建议阅读:1.地图优化代码理解
3.特征关联代码理解
以上博客会随时更新,如果对你有帮助,请点击注释代码的github仓库右上角star按钮,你的鼓励将给我更多动力。
文章目录
featureAssociation.cpp概述
featureAssociation.cpp顾名思义,进行特征关联的过程。
FeatureAssociation
FeatureAssociation()构造函数的内容如下:
-
订阅话题:
"/segmented_cloud"(sensor_msgs::PointCloud2),数据处理函数laserCloudHandler"/segmented_cloud_info"(cloud_msgs::cloud_info),数据处理函数laserCloudInfoHandler"/outlier_cloud"(sensor_msgs::PointCloud2),数据处理函数outlierCloudHandlerimuTopic = "/imu/data"(sensor_msgs::Imu),数据处理函数imuHandler
-
发布话题,这些topic有:
"/laser_cloud_sharp"(sensor_msgs::PointCloud2)"/laser_cloud_less_sharp"(sensor_msgs::PointCloud2)"/laser_cloud_flat"(sensor_msgs::PointCloud2)"/laser_cloud_less_flat"(sensor_msgs::PointCloud2)"/laser_cloud_corner_last"(sensor_msgs::PointCloud2)"/laser_cloud_surf_last"(cloud_msgs::cloud_info)"/outlier_cloud_last"(sensor_msgs::PointCloud2)"/laser_odom_to_init"(nav_msgs::Odometry)
然后初始化各类参数。
laserCloudHandler
laserCloudHandler修改点云数据的时间戳,将点云数据从ROS定义的格式转化到pcl的格式。
laserCloudInfoHandler
函数比较小:
void laserCloudInfoHandler(const cloud_msgs::cloud_infoConstPtr& msgIn){
timeNewSegmentedCloudInfo = msgIn->header.stamp.toSec();
segInfo = *msgIn;
newSegmentedCloudInfo = true;
}
outlierCloudHandler
void outlierCloudHandler(const sensor_msgs::PointCloud2ConstPtr& msgIn){
timeNewOutlierCloud = msgIn->header.stamp.toSec();
outlierCloud->clear();
pcl::fromROSMsg(*msgIn, *outlierCloud);
newOutlierCloud = true;
}
imuHandler
void imuHandler(const sensor_msgs::Imu::ConstPtr& imuIn)接触过很多次,因为它就是LOAM代码里的那个。
函数的实现:
- 通过接收到的imuIn里面的四元素得到roll,pitch,yaw三个角;
- 对加速度进行坐标变换(坐标变换可以参考下面这张图);
- 将欧拉角,加速度,速度保存到循环队列中;
- 对速度,角速度,加速度进行积分,得到位移,角度和速度(
AccumulateIMUShiftAndRotation());
加速度坐标交换的示意图:
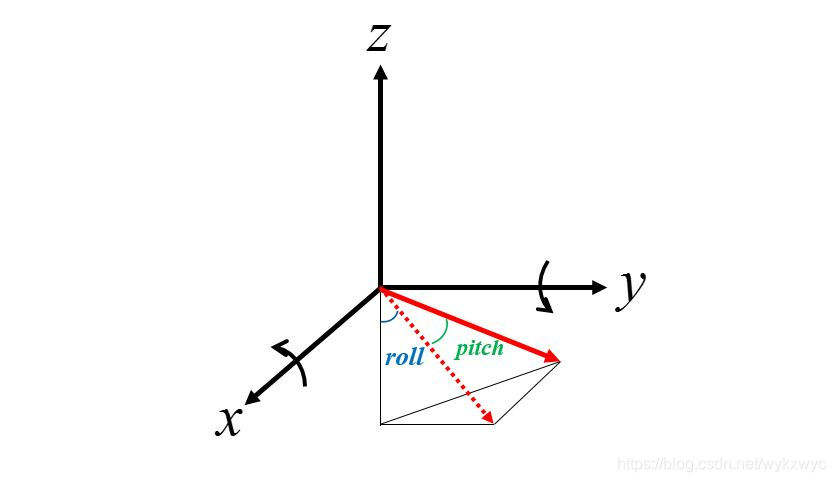
- 进行加速度坐标交换时将重力加速度去除,然后再进行 x x x到 z z z, y y y到 x x x, z z z到 y y y的变换。
- 去除重力加速度的影响时,需要把重力加速度分解到三个坐标轴上,然后分别去除他们分量的影响,在去除的过程中需要注意加减号(默认右手坐标系的旋转方向来看)。
- 在上面示意图中,可以简单理解为红色箭头实线分解到红色箭头虚线上(根据 p i t c h pitch pitch进行分解),然后再按找 r o l l roll roll角进行分解。
runFeatureAssociation
void runFeatureAssociation()是featureAssociation.cpp中最主要的函数,它调用这个cpp文件中的其他函数。算法步骤如下:
- 如果有新数据进来则执行,否则不执行任何操作;
- 将点云数据进行坐标变换,进行插补等工作;
- 进行光滑性计算,并保存结果;
- 标记阻塞点(阻塞点:点云中可能出现的互相遮挡的点);
- 特征抽取,然后分别保存到
cornerPointsSharp等等队列中去; - 发布
cornerPointsSharp等4种类型的点云数据; - 预测位姿;
- 更新变换;
- 积分总变换;
- 发布里程计信息及上一次点云信息;
adjustDistortion
void adjustDistortion()将点云数据进行坐标变换,进行插补等工作。
- 对每个点进行处理,首先进行和laboshin_loam代码中的一样的坐标轴变换过程。
point.x = segmentedCloud->points[i].y;
point.y = segmentedCloud->points[i].z;
point.z = segmentedCloud->points[i].x;
- 针对每个点计算偏航角yaw,然后根据不同的偏航角,可以知道激光雷达扫过的位置有没有超过一半,计算的时候有一部分需要注意一下:
函数原型:
// -atan2(p.x,p.z)==>-atan2(y,x)
// ori表示的是偏航角yaw,因为前面有负号,ori=[-M_PI,M_PI)
// 因为segInfo.orientationDiff表示的范围是(PI,3PI),在2PI附近
// 下面过程的主要作用是调整ori大小,满足start<ori<end
float ori = -atan2(point.x, point.z);
这里分为4种情况:
- 没有转过一半,但是
start-ori>M_PI/2 - 没有转过一半,但是
ori-start>3/2*M_PI,说明ori太大,不合理(正常情况在前半圈的话,ori-start范围[0,M_PI]) - 转过一半,
end-ori>3/2*PI,ori太小 - 转过一半,
ori-end>M_PI/2,太大
- 然后进行imu数据与激光数据的时间轴对齐操作。
对齐时候有两种情况,一种不能用插补来优化,一种可以通过插补进行优化。
- 不能通过插补进行优化:imu数据比激光数据早,但是没有更后面的数据(打个比方,激光在9点时出现,imu现在只有8点的)
这种情况下while循环是以imuPointerFront == imuPointerLast结束的:
// while循环内进行时间轴对齐
while (imuPointerFront != imuPointerLast) {
if (timeScanCur + pointTime < imuTime[imuPointerFront]) {
break;
}
imuPointerFront = (imuPointerFront + 1) % imuQueLength;
}
- 可以通过插补来进行数据的优化:
这种情况只有在imu数据充足的情况下才会发生,
进行插补时,当前timeScanCur + pointTime < imuTime[imuPointerFront],
而且imuPointerFront是最早一个时间大于timeScanCur + pointTime的imu数据指针。
imuPointerBack是imuPointerFront的前一个imu数据指针。
插补的代码:
int imuPointerBack = (imuPointerFront + imuQueLength - 1) % imuQueLength;
float ratioFront = (timeScanCur + pointTime - imuTime[imuPointerBack])
/ (imuTime[imuPoi 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2917
2917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









