






- 模拟I2C驱动BMP280气压传感器
- 模拟SPI
- CAN通信
模拟I2C驱动BMP280气压传感器
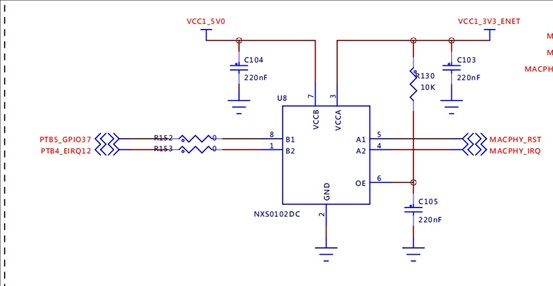
模拟I2C没什么好说的,只需要三个GPIO功能即可:设置SDA引脚的输入以及输出方向,设置SCL SDA引脚的输出高低电平,读取SDA引脚的输入值,直接 将要用到的SCL和SDA引脚初始化为GPIO即可:
![]()
用到了开发板上的PTB5和PTB4,这两个引脚经过了一个电平转换芯片,高电平为3.3V:
直接上代码:
#define FAKE_I2C_SCL_PTB5_HIGH Siul2_Dio_Ip_WritePin(FAKE_I2C_SCL_PORT , FAKE_I2C_SCL_PIN , 1);
#define FAKE_I2C_SCL_PTB5_LOW Siul2_Dio_Ip_WritePin(FAKE_I2C_SCL_PORT , FAKE_I2C_SCL_PIN , 0);
#define FAKE_I2C_SDA_PTB4_HIGH Siul2_Dio_Ip_WritePin(FAKE_I2C_SDA_PORT , FAKE_I2C_SDA_PIN , 1);
#define FAKE_I2C_SDA_PTB4_LOW Siul2_Dio_Ip_WritePin(FAKE_I2C_SDA_PORT , FAKE_I2C_SDA_PIN , 0);
#define FAKE_I2C_SDA_PTB4_IN Siul2_Port_Ip_SetPinDirection(PORTB_L_HALF , 4 , SIUL2_PORT_IN);
#define FAKE_I2C_SDA_PTB4_OUT Siul2_Port_Ip_SetPinDirection(PORTB_L_HALF , 4 , SIUL2_PORT_OUT);
#define I2C_SDA_PTB4_READ Siul2_Dio_Ip_ReadPin(FAKE_I2C_SDA_PORT , FAKE_I2C_SDA_PIN)
void Fake_I2C_Idle_PTB5_PTB4()
{
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_HIGH;
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
}
void Fake_I2C_Start_PTB5_PTB4(void)
{
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_HIGH;
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SDA_PTB4_LOW;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(4);
}
void Fake_I2C_Stop_PTB5_PTB4(void)
{
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_LOW;
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SDA_PTB4_HIGH;
}
uint8_t Fake_I2C_Wait_Ack_PTB5_PTB4(void)
{
uint8_t rvalue;
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SDA_PTB4_IN;
if(I2C_SDA_PTB4_READ)
{
rvalue = 1;
}
else
{
rvalue = 0;
}
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(4);
return rvalue;
}
void Fake_I2C_Ack_PTB5_PTB4(void)
{
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_LOW;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(4);
FAKE_I2C_SDA_PTB4_HIGH;
}
void Fake_I2C_NAck_PTB5_PTB4(void)
{
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SDA_PTB4_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(4);
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(4);
}
void Fake_I2C_Send_Byte_PTB5_PTB4(uint8_t txd)
{
uint8_t i;
FAKE_I2C_SDA_PTB4_OUT;
FAKE_I2C_SCL_PTB5_LOW;
for(i = 0 ; i < 8 ; i ++)
{
if((txd & 0x80) >> 7)
{
FAKE_I2C_SDA_PTB4_HIGH;
}
else
{
FAKE_I2C_SDA_PTB4_LOW;
}
txd <<= 1;
Pit0_Delay_us(20);
FAKE_I2C_SCL_PTB5_HIGH;
Pit0_Delay_us(20);
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(20);
}
Pit0_Delay_us(20);
}
uint16_t Fake_I2C_Read_Byte_PTB5_PTB4(uint8_t ack)
{
uint8_t i;
uint16_t dat = 0;
FAKE_I2C_SDA_PTB4_IN;
for(i = 0 ; i < 8 ; i++)
{
FAKE_I2C_SCL_PTB5_LOW;
Pit0_Delay_us(20);
FAKE_I2C_SCL_PTB5_HIGH;
dat <<= 1;
if(I2C_SDA_PTB4_READ)
dat++;
Pit0_Delay_us(20);
}
if (!ack)
{
Fake_I2C_NAck_PTB5_PTB4();
}
else
{
Fake_I2C_Ack_PTB5_PTB4();
}
return dat;
}
uint8_t Fake_I2C_Read_Addr_PTB5_PTB4(uint8_t dev_addr , uint8_t reg)
{
uint8_t res;
Fake_I2C_Start_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4((dev_addr << 1) | 0);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4(reg);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Start_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4((dev_addr << 1) | 1);
Fake_I2C_Wait_Ack_PTB5_PTB4();
res = Fake_I2C_Read_Byte_PTB5_PTB4(0);
Fake_I2C_Stop_PTB5_PTB4();
return res;
}
void Fake_I2C_Read_Datas_PTB5_PTB4(uint8_t dev_addr , uint8_t reg , uint8_t data_len , uint8_t data[])
{
while(data_len)
{
*data = Fake_I2C_Read_Addr_PTB5_PTB4(dev_addr , reg++);
data ++;
data_len --;
}
}
void Fake_I2C_Write_Reg_Data_PTB5_PTB4(uint8_t dev_addr , uint8_t reg , uint8_t data)
{
Fake_I2C_Start_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4((dev_addr << 1) | 0);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4(reg);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4(data);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Stop_PTB5_PTB4();
}
void Fake_I2C_Write_Reg_Datas_PTB5_PTB4(uint8_t dev_addr , uint8_t reg , uint8_t data_len , uint8_t data[])
{
int i;
Fake_I2C_Start_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4((dev_addr << 1) | 0);
Fake_I2C_Wait_Ack_PTB5_PTB4();
Fake_I2C_Send_Byte_PTB5_PTB4(reg);
Fake_I2C_Wait_Ack_PTB5_PTB4();
for(i = 0 ; i < data_len ; i++)
{
Fake_I2C_Send_Byte_PTB5_PTB4(data[i]);
Fake_I2C_Wait_Ack_PTB5_PTB4();
}
Fake_I2C_Stop_PTB5_PTB4();
Pit0_Delay_ms(10);
}
#define ATH20_SLAVE_ADDRESS 0x38
#define BMP280_PRESSURE_OSR (BMP280_OVERSAMP_8X)
#define BMP280_TEMPERATURE_OSR (BMP280_OVERSAMP_16X)
#define BMP280_MODE (BMP280_PRESSURE_OSR << 2 | BMP280_TEMPERATURE_OSR << 5 | BMP280_NORMAL_MODE)
#define BMP280_SLAVE_ADDRESS_0x76 0x76
#define BMP280_SLAVE_ADDRESS_0x77 0x77
/*calibration parameters */
#define BMP280_DIG_T1_LSB_REG 0x88
#define BMP280_DIG_T1_MSB_REG 0x89
#define BMP280_DIG_T2_LSB_REG 0x8A
#define BMP280_DIG_T2_MSB_REG 0x8B
#define BMP280_DIG_T3_LSB_REG 0x8C
#define BMP280_DIG_T3_MSB_REG 0x8D
#define BMP280_DIG_P1_LSB_REG 0x8E
#define BMP280_DIG_P1_MSB_REG 0x8F
#define BMP280_DIG_P2_LSB_REG 0x90
#define BMP280_DIG_P2_MSB_REG 0x91
#define BMP280_DIG_P3_LSB_REG 0x92
#define BMP280_DIG_P3_MSB_REG 0x93
#define BMP280_DIG_P4_LSB_REG 0x94
#define BMP280_DIG_P4_MSB_REG 0x95
#define BMP280_DIG_P5_LSB_REG 0x96
#define BMP280_DIG_P5_MSB_REG 0x97
#define BMP280_DIG_P6_LSB_REG 0x98
#define BMP280_DIG_P6_MSB_REG 0x99
#define BMP280_DIG_P7_LSB_REG 0x9A
#define BMP280_DIG_P7_MSB_REG 0x9B
#define BMP280_DIG_P8_LSB_REG 0x9C
#define BMP280_DIG_P8_MSB_REG 0x9D
#define BMP280_DIG_P9_LSB_REG 0x9E
#define BMP280_DIG_P9_MSB_REG 0x9F
#define BMP280_CHIPID_REG 0xD0 /*Chip ID Register */
#define BMP280_RESET_REG 0xE0 /*Softreset Register */
#define BMP280_STATUS_REG 0xF3 /*Status Register */
#define BMP280_CTRLMEAS_REG 0xF4 /*Ctrl Measure Register */
#define BMP280_CONFIG_REG 0xF5 /*Configuration Register */
#define BMP280_PRESSURE_MSB_REG 0xF7 /*Pressure MSB Register */
#define BMP280_PRESSURE_LSB_REG 0xF8 /*Pressure LSB Register */
#define BMP280_PRESSURE_XLSB_REG 0xF9 /*Pressure XLSB Register */
#define BMP280_TEMPERATURE_MSB_REG 0xFA /*Temperature MSB Reg */
#define BMP280_TEMPERATURE_LSB_REG 0xFB /*Temperature LSB Reg */
#define BMP280_TEMPERATURE_XLSB_REG 0xFC /*Temperature XLSB Reg */
#define BMP280_SLEEP_MODE (0x00)
#define BMP280_FORCED_MODE (0x01)
#define BMP280_NORMAL_MODE (0x03)
#define BMP280_TEMPERATURE_CALIB_DIG_T1_LSB_REG (0x88)
#define BMP280_PRESSURE_TEMPERATURE_CALIB_DATA_LENGTH (24)
#define BMP280_DATA_FRAME_SIZE (6)
#define BMP280_OVERSAMP_SKIPPED (0x00)
#define BMP280_OVERSAMP_1X (0x01)
#define BMP280_OVERSAMP_2X (0x02)
#define BMP280_OVERSAMP_4X (0x03)
#define BMP280_OVERSAMP_8X (0x04)
#define BMP280_OVERSAMP_16X (0x05)
#define CONST_PF 0.1902630958
//(1/5.25588f) Pressure factor
#define FIX_TEMP 25
// Fixed Temperature. ASL is a function of pressure and temperature, but as the temperature changes so much (blow a little towards the flie and watch it drop 5 degrees) it corrupts the ASL estimates.
// TLDR: Adjusting for temp changes does more harm than good.
typedef struct
{
uint16_t dig_T1;/* calibration T1 data */
int16_t dig_T2; /* calibration T2 data */
int16_t dig_T3; /* calibration T3 data */
uint16_t dig_P1;/* calibration P1 data */
int16_t dig_P2; /* calibration P2 data */
int16_t dig_P3; /* calibration P3 data */
int16_t dig_P4; /* calibration P4 data */
int16_t dig_P5; /* calibration P5 data */
int16_t dig_P6; /* calibration P6 data */
int16_t dig_P7; /* calibration P7 data */
int16_t dig_P8; /* calibration P8 data */
int16_t dig_P9; /* calibration P9 data */
int t_fine; /* calibration t_fine data */
} bmp280Calib;
uint8_t msb , lsb , xlsb;
float var1 , var2;
bmp280Calib bmp280Cal;
uint8_t BMP280_Init(void)
{
uint8_t bmp280_id;
uint8_t tmp[1];
printf("BMP280_Init.\n");
Fake_I2C_Read_Datas_PTB5_PTB4(BMP280_SLAVE_ADDRESS_0x77 , BMP280_CHIPID_REG, 1, &bmp280_id);
printf("bmp280_id = 0x%x\n" , bmp280_id);
Fake_I2C_Read_Datas_PTB5_PTB4(BMP280_SLAVE_ADDRESS_0x77, BMP280_DIG_T1_LSB_REG , 24 , (uint8_t *)&bmp280Cal);
//printf("%d %d %d %d %d %d %d %d %d %d %d %d\n" ,
// bmp280Cal.dig_T1 , bmp280Cal.dig_T2 , bmp280Cal.dig_T3 ,
// bmp280Cal.dig_P1 , bmp280Cal.dig_P2 , bmp280Cal.dig_P3 ,
// bmp280Cal.dig_P4 , bmp280Cal.dig_P5 , bmp280Cal.dig_P6 ,
// bmp280Cal.dig_P7 , bmp280Cal.dig_P8 , bmp280Cal.dig_P9);
tmp[0] = BMP280_MODE;
Fake_I2C_Write_Reg_Datas_PTB5_PTB4(BMP280_SLAVE_ADDRESS_0x77 , BMP280_CTRLMEAS_REG , 1 , tmp);
tmp[0] = 5 << 2;
Fake_I2C_Write_Reg_Datas_PTB5_PTB4(BMP280_SLAVE_ADDRESS_0x77 , BMP280_CONFIG_REG , 1 , tmp);
return bmp280_id;
}连接BMP280到开发板,观察BMP280读数:

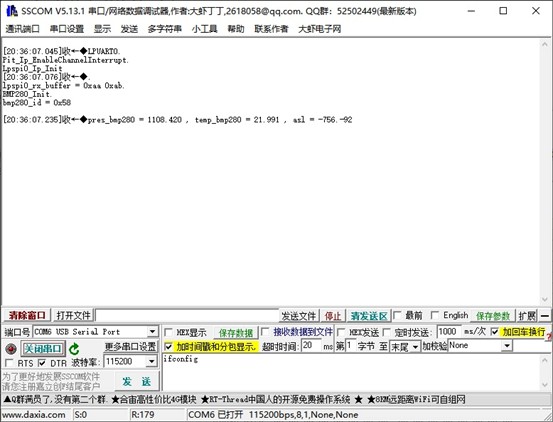
但是发现了一个问题,使用printf函数,无法打印浮点数,只能通过整形方式强转,并且使用abs()函数会卡死:
BMP280_Read_Pressure_Tempature(&bmp280_pres , &bmp280_temp);
asl = BMP280PressureToAltitude(&bmp280_pres);
printf("pres_bmp280 = %d.%-3d , temp_bmp280 = %d.%-3d , asl = %d.%-3d\n" ,
(int)bmp280_pres , ((int)(bmp280_pres * 1000)) % 1000 ,
(int)bmp280_temp , ((int)(bmp280_temp * 1000)) % 1000 ,
(int)asl , ((int)(asl * 1000)) % 1000
);这个原因跟编译器和编译器选项有关,不深究。
1. 模拟SPI
由于开发板的硬件SPI波形调试一直不顺利:
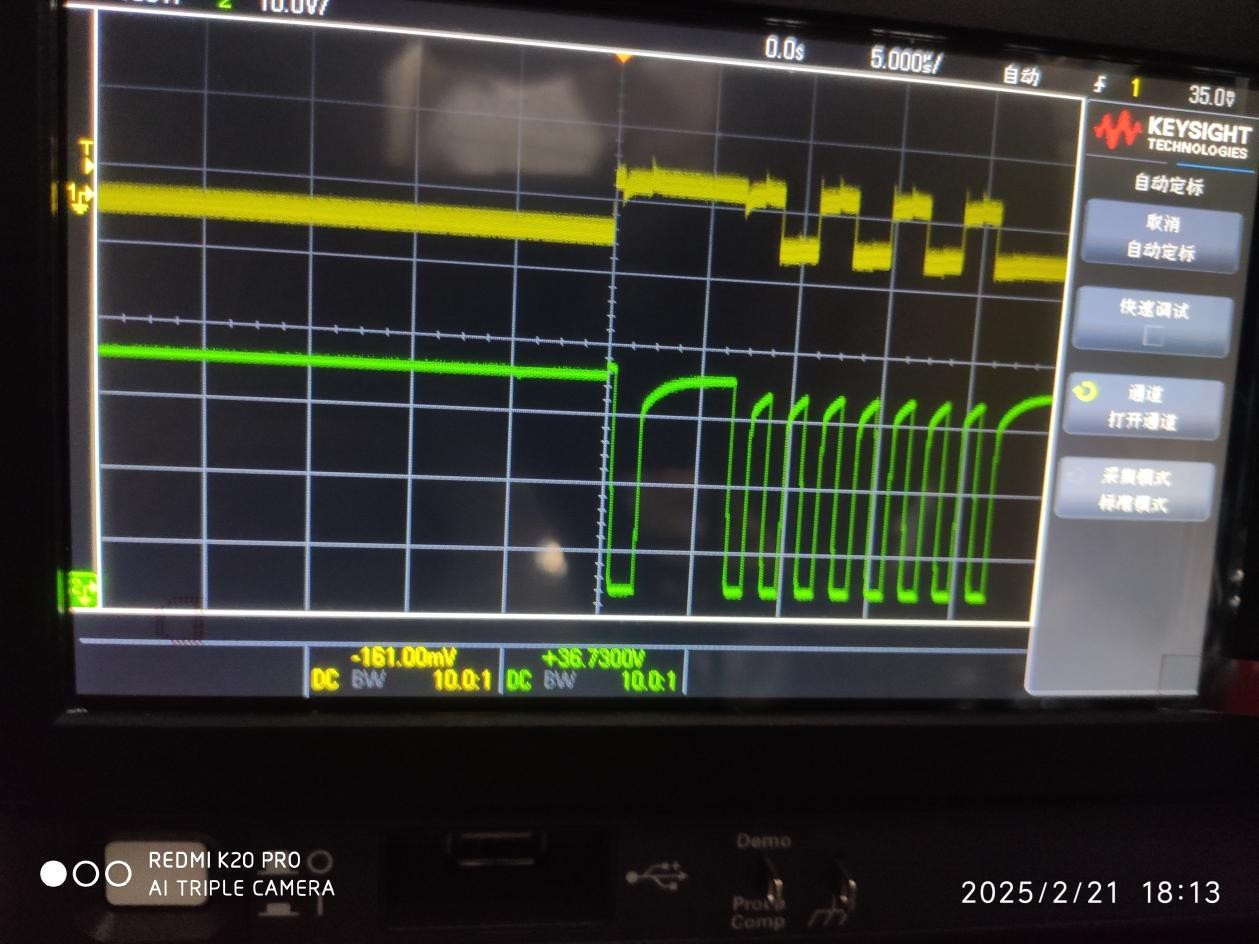
在八位数据前有一个原因不明的时钟上升沿,因此使用模拟SPI:

模拟SPI实现函数:
#define LPSPI0_BUFFER_NUM 2
uint8_t lpspi0_tx_buffer[LPSPI0_BUFFER_NUM] = {0xaa , 0xab};
uint8_t lpspi0_rx_buffer[LPSPI0_BUFFER_NUM] = {0};
#define SPITFTLCD24_RESET_HIGH Siul2_Dio_Ip_WritePin(FAKE_RST_PORT , FAKE_RST_PIN , 1);
#define SPITFTLCD24_RESET_LOW Siul2_Dio_Ip_WritePin(FAKE_RST_PORT , FAKE_RST_PIN , 0);
#define SPITFTLCD24_A0_HIGH Siul2_Dio_Ip_WritePin(FAKE_A0_PORT , FAKE_A0_PIN , 1);
#define SPITFTLCD24_A0_LOW Siul2_Dio_Ip_WritePin(FAKE_A0_PORT , FAKE_A0_PIN , 0);
#define SPITFTLCD24_CS_HIGH Siul2_Dio_Ip_WritePin(FAKE_SPI_CS_PORT , FAKE_SPI_CS_PIN , 1);
#define SPITFTLCD24_CS_LOW Siul2_Dio_Ip_WritePin(FAKE_SPI_CS_PORT , FAKE_SPI_CS_PIN , 0);
#define SPITFTLCD24_MOSI_HIGH Siul2_Dio_Ip_WritePin(FAKE_SPI_MOSI_PORT , FAKE_SPI_MOSI_PIN , 1);
#define SPITFTLCD24_MOSI_LOW Siul2_Dio_Ip_WritePin(FAKE_SPI_MOSI_PORT , FAKE_SPI_MOSI_PIN , 0);
#define SPITFTLCD24_CLK_HIGH Siul2_Dio_Ip_WritePin(FAKE_SPI_CLK_PORT , FAKE_SPI_CLK_PIN , 1);
#define SPITFTLCD24_CLK_LOW Siul2_Dio_Ip_WritePin(FAKE_SPI_CLK_PORT , FAKE_SPI_CLK_PIN , 0);
#define SPITFTLCD24_COLUMN_NUMBER 240
#define SPITFTLCD24_LINE_NUMBER 320
#define SPITFTLCD24_COLUMN_OFFSET 0
#define RED 0xf800
#define GREEN 0x07e0
#define BLUE 0x001f
#define CYAN 0x07ff
#define WHITE 0xffff
#define BLACK 0
void SPITFTLCD24_SEND_CMD(unsigned char o_command)
{
uint8_t i;
SPITFTLCD24_A0_LOW;
SPITFTLCD24_CS_LOW;
SPITFTLCD24_CLK_HIGH;
for(i = 0; i < 8; i ++)
{
SPITFTLCD24_CLK_LOW;
if(o_command & 0x80)
{
SPITFTLCD24_MOSI_HIGH;
}
else
{
SPITFTLCD24_MOSI_LOW;
}
o_command <<= 1;
SPITFTLCD24_CLK_HIGH;
}
SPITFTLCD24_CLK_HIGH;
SPITFTLCD24_CS_HIGH;
}
void SPITFTLCD24_SEND_DATA(unsigned char o_data)
{
uint8_t i;
SPITFTLCD24_A0_HIGH;
SPITFTLCD24_CS_LOW;
for(i = 0; i < 8; i ++)
{
SPITFTLCD24_CLK_LOW;
if(o_data & 0x80)
{
SPITFTLCD24_MOSI_HIGH;
}
else
{
SPITFTLCD24_MOSI_LOW;
}
o_data <<= 1;
SPITFTLCD24_CLK_HIGH;
}
SPITFTLCD24_CS_HIGH;
}
//void SPITFTLCD24_SEND_CMD(unsigned char o_command)
//{
// SPITFTLCD24_A0_LOW;
// SPITFTLCD24_CS_LOW;
// Lpspi_Ip_SyncTransmit(
// //&Lpspi_Ip_PhyUnitConfig_SpiPhyUnit_0_Instance_0
// //错误用法
//
// &Lpspi_Ip_DeviceAttributes_SpiExternalDevice_LPSPI2_Instance_0 ,
// //正确用法
//
// &o_command ,
// NULL ,
// 1 ,
// 0xffff
// );
// SPITFTLCD24_CS_HIGH;
//}
//
//void SPITFTLCD24_SEND_DATA(unsigned char o_data)
//{
// SPITFTLCD24_A0_HIGH;
// SPITFTLCD24_CS_LOW;
// Lpspi_Ip_SyncTransmit(
// &Lpspi_Ip_DeviceAttributes_SpiExternalDevice_LPSPI2_Instance_0 ,
// &o_data ,
// NULL ,
// 1 ,
// 0xffff
// );
// SPITFTLCD24_CS_HIGH;
//}
void SPITFTLCD24_Clear(void)
{
uint32_t row , column;
SPITFTLCD24_SEND_CMD(0x2a); //Column address set
SPITFTLCD24_SEND_DATA(0x00); //start column
SPITFTLCD24_SEND_DATA(0x00);
SPITFTLCD24_SEND_DATA(0x00); //end column
SPITFTLCD24_SEND_DATA(0xF0);
SPITFTLCD24_SEND_CMD(0x2b); //Row address set
SPITFTLCD24_SEND_DATA(0x00); //start row
SPITFTLCD24_SEND_DATA(0x00);
SPITFTLCD24_SEND_DATA(0x01); //end row
SPITFTLCD24_SEND_DATA(0x40);
SPITFTLCD24_SEND_CMD(0x2C); //Memory write
for(row = 0 ; row < SPITFTLCD24_LINE_NUMBER ; row++)
{
for(column = 0 ; column < SPITFTLCD24_COLUMN_NUMBER ; column++)
//column loop
{
SPITFTLCD24_SEND_DATA(0xFF);
SPITFTLCD24_SEND_DATA(0xFF);
}
}
}
void SPITFTLCD24_Full(uint16_t color)
{
uint32_t row , column;
SPITFTLCD24_SEND_CMD(0x2a); //Column address set
SPITFTLCD24_SEND_DATA(0x00); //start column
SPITFTLCD24_SEND_DATA(0x00);
SPITFTLCD24_SEND_DATA(0x00); //end column
SPITFTLCD24_SEND_DATA(0xF0);
SPITFTLCD24_SEND_CMD(0x2b); //Row address set
SPITFTLCD24_SEND_DATA(0x00); //start row
SPITFTLCD24_SEND_DATA(0x00);
SPITFTLCD24_SEND_DATA(0x01); //end row
SPITFTLCD24_SEND_DATA(0x40);
SPITFTLCD24_SEND_CMD(0x2C); //Memory write
for(row = 0 ; row < SPITFTLCD24_LINE_NUMBER ; row++)
{
for(column = 0 ; column < SPITFTLCD24_COLUMN_NUMBER ; column++)
//column loop
{
SPITFTLCD24_SEND_DATA(color >> 8);
SPITFTLCD24_SEND_DATA(color);
}
}
}
void SPITFTLCD24_Init(void)
{
SPITFTLCD24_RESET_LOW;
Pit0_Delay_ms(10);
SPITFTLCD24_RESET_HIGH;
Pit0_Delay_ms(120);
SPITFTLCD24_SEND_CMD(0x01);
//Software Reset
Pit0_Delay_ms(120);
SPITFTLCD24_SEND_CMD(0x11);
//Sleep Out
Pit0_Delay_ms(120);
//DELAY120ms
SPITFTLCD24_SEND_CMD(0x3A); //65k mode
SPITFTLCD24_SEND_DATA(0x05);
SPITFTLCD24_SEND_CMD(0xC5); //VCOM
SPITFTLCD24_SEND_DATA(0x1A);
SPITFTLCD24_SEND_CMD(0x36); // ??L???????????
SPITFTLCD24_SEND_DATA(0x00);
//-------------ST7789V Frame rate setting-----------//
SPITFTLCD24_SEND_CMD(0xb2); //Porch Setting
SPITFTLCD24_SEND_DATA(0x05);
SPITFTLCD24_SEND_DATA(0x05);
SPITFTLCD24_SEND_DATA(0x00);
SPITFTLCD24_SEND_DATA(0x33);
SPITFTLCD24_SEND_DATA(0x33);
SPITFTLCD24_SEND_CMD(0xb7); //Gate Control
SPITFTLCD24_SEND_DATA(0x05); //12.2v -10.43v
//--------------ST7789V Power setting---------------//
SPITFTLCD24_SEND_CMD(0xBB);//VCOM
SPITFTLCD24_SEND_DATA(0x3F);
SPITFTLCD24_SEND_CMD(0xC0); //Power control
SPITFTLCD24_SEND_DATA(0x2c);
SPITFTLCD24_SEND_CMD(0xC2); //VDV and VRH Command Enable
SPITFTLCD24_SEND_DATA(0x01);
SPITFTLCD24_SEND_CMD(0xC3); //VRH Set
SPITFTLCD24_SEND_DATA(0x0F); //4.3+( vcom+vcom offset+vdv)
SPITFTLCD24_SEND_CMD(0xC4); //VDV Set
SPITFTLCD24_SEND_DATA(0x20); //0v
SPITFTLCD24_SEND_CMD(0xC6); //Frame Rate Control in Normal Mode
SPITFTLCD24_SEND_DATA(0X01); //111Hz
SPITFTLCD24_SEND_CMD(0xd0); //Power Control 1
SPITFTLCD24_SEND_DATA(0xa4);
SPITFTLCD24_SEND_DATA(0xa1);
SPITFTLCD24_SEND_CMD(0xE8); //Power Control 1
SPITFTLCD24_SEND_DATA(0x03);
SPITFTLCD24_SEND_CMD(0xE9); //Equalize time control
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x08);
//---------------ST7789V gamma setting-------------//
SPITFTLCD24_SEND_CMD(0xE0); //Set Gamma
SPITFTLCD24_SEND_DATA(0xD0);
SPITFTLCD24_SEND_DATA(0x05);
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x08);
SPITFTLCD24_SEND_DATA(0x14);
SPITFTLCD24_SEND_DATA(0x28);
SPITFTLCD24_SEND_DATA(0x33);
SPITFTLCD24_SEND_DATA(0x3F);
SPITFTLCD24_SEND_DATA(0x07);
SPITFTLCD24_SEND_DATA(0x13);
SPITFTLCD24_SEND_DATA(0x14);
SPITFTLCD24_SEND_DATA(0x28);
SPITFTLCD24_SEND_DATA(0x30);
SPITFTLCD24_SEND_CMD(0XE1); //Set Gamma
SPITFTLCD24_SEND_DATA(0xD0);
SPITFTLCD24_SEND_DATA(0x05);
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x09);
SPITFTLCD24_SEND_DATA(0x08);
SPITFTLCD24_SEND_DATA(0x03);
SPITFTLCD24_SEND_DATA(0x24);
SPITFTLCD24_SEND_DATA(0x32);
SPITFTLCD24_SEND_DATA(0x32);
SPITFTLCD24_SEND_DATA(0x3B);
SPITFTLCD24_SEND_DATA(0x14);
SPITFTLCD24_SEND_DATA(0x13);
SPITFTLCD24_SEND_DATA(0x28);
SPITFTLCD24_SEND_DATA(0x2F);
SPITFTLCD24_SEND_CMD(0x20);
Pit0_Delay_ms(120);
SPITFTLCD24_SEND_CMD(0x29);
}
但是效果不理想,刷屏太慢,因此还在想别的办法。
2. CAN通信
调试CAN通信这个环节不是很顺利,即使到最后能输出波形,但是仍然不能与其他厂商的MCU成功进行CAN通信。
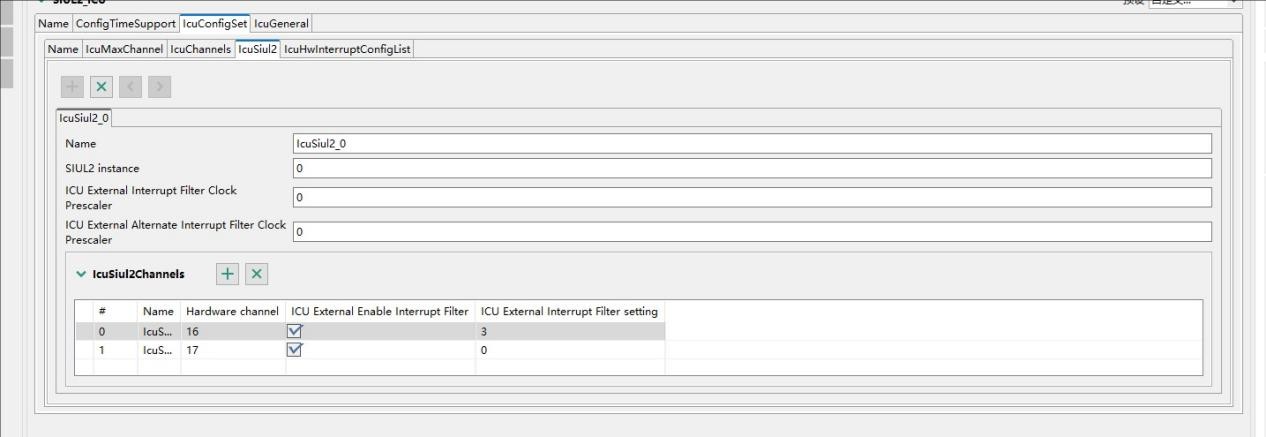
调试CAN通信需要先把前置模块Siul2_Icu模块使能,并添加两个通道:
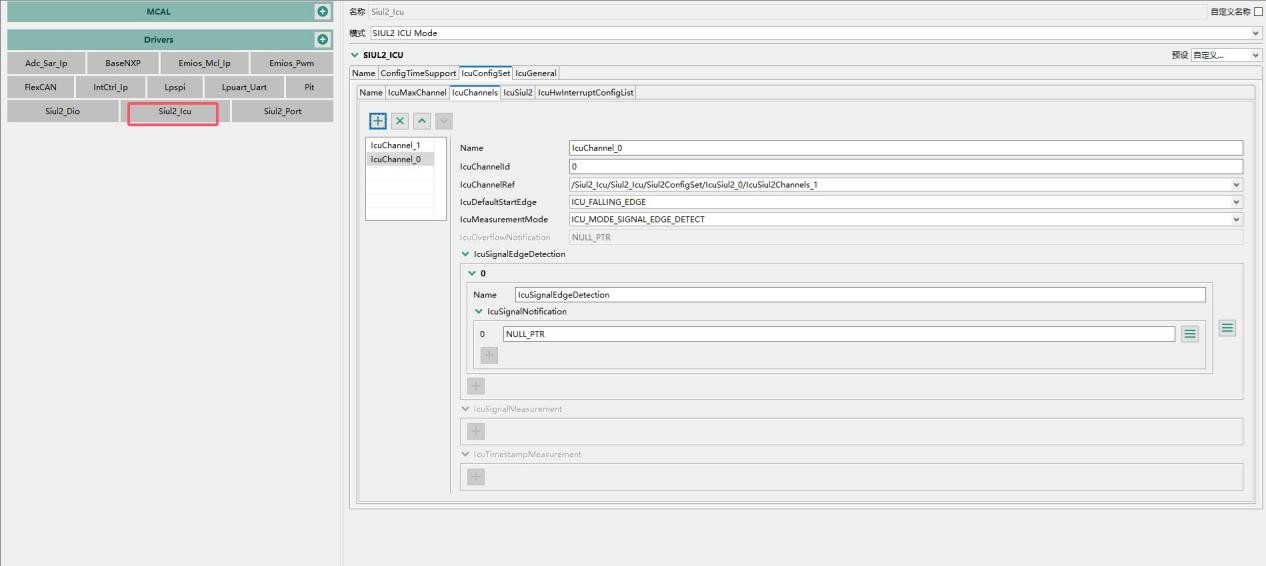
添加硬件通道16和17:
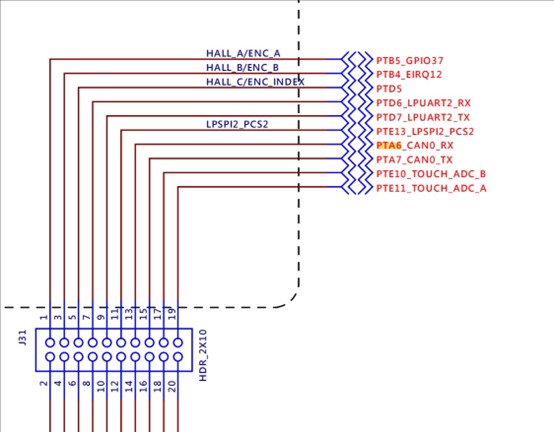
引脚则是选用PTA6和PTA7作为CAN0的输出:

PTA6和PTA7在J31母座上:
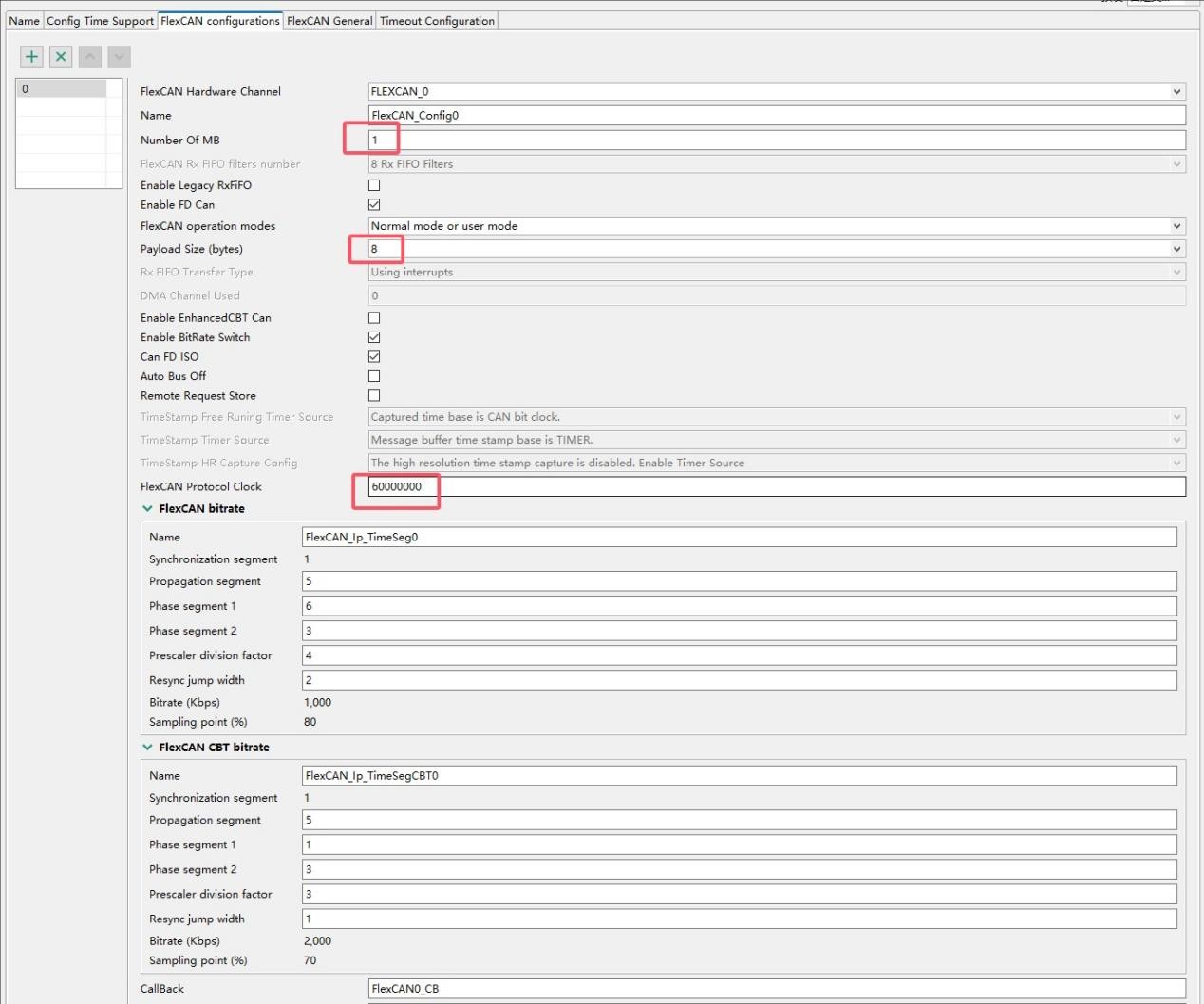
对于FlexCAN的配置则是参考论坛的帖子进行的,自己改了一些参数,设置1MB长度,Payload 8字节,协议时钟和波特率参数则是照抄:
将PTA6和PTA7引脚与CAN收发模块进行连接:
初始化和CAN发送代码如下:
Siul2_Icu_Ip_Init(0,&Siul2_Icu_Ip_0_Config_PB);
Siul2_Icu_Ip_EnableInterrupt(0,(*Siul2_Icu_Ip_0_Config_PB.pChannelsConfig)[0].hwChannel);
Siul2_Icu_Ip_EnableInterrupt(0,(*Siul2_Icu_Ip_0_Config_PB.pChannelsConfig)[1].hwChannel);
Siul2_Icu_Ip_EnableNotification(0,(*Siul2_Icu_Ip_0_Config_PB.pChannelsConfig)[0].hwChannel);
Siul2_Icu_Ip_EnableNotification(0,(*Siul2_Icu_Ip_0_Config_PB.pChannelsConfig)[1].hwChannel);
FlexCAN_Ip_Init(0, &FlexCAN_State0, &FlexCAN_Config0);
FlexCAN_Ip_SetStartMode(0);
while(1)
{
FlexCAN_Ip_Send(0 , TX_MB_IDX , &CAN_NODE_0_TX_MB0_Config , FLEXCAN_MSG_ID , (uint8_t *)&dummyData);
Pit0_Delay_ms(100);
printf("FlexCAN_Ip_Send.\n");
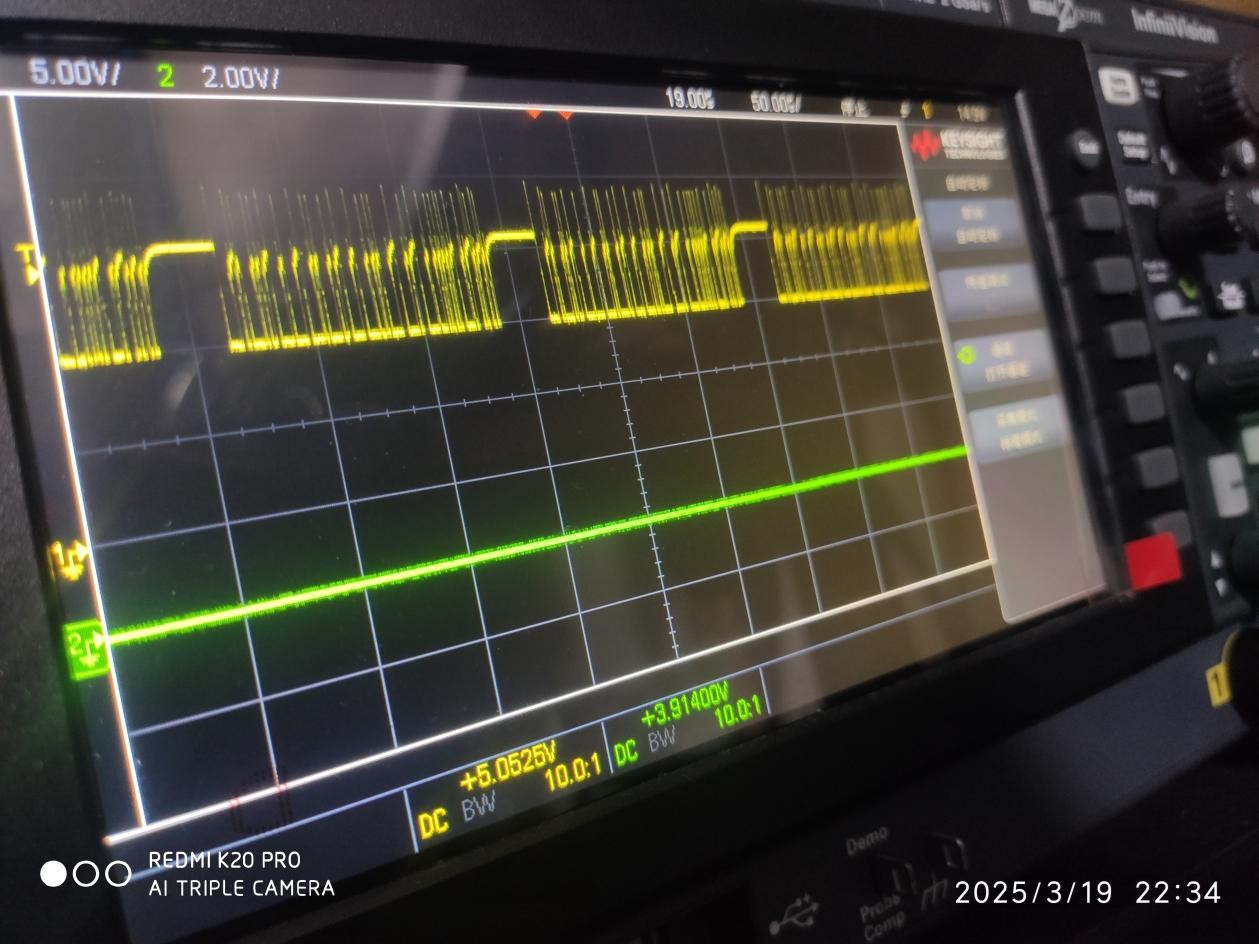
}将示波器的探头接入CANH和CANL两个输出引脚:
文章来自“S32K312 开发板评测活动”测评者:李明
欢迎在博文下方留言评论,我们会及时回复您的问题。


















 231
231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









