







【机器人运动学】——学习笔记
一、位置姿态的描述
-
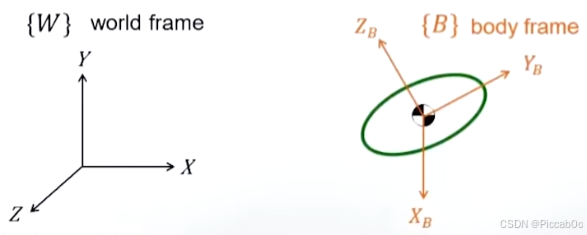
利用世界坐标系world frame+物体坐标系body frame
-
瞬态的描述:
(1)平动:由“物体坐标系原点在世界坐标系下的位置”来描述。
(2)转动:由“物体坐标系三个坐标轴相对于世界坐标系坐标轴的姿态”来描述。
- 动态的描述:
(1)位置→微分→速度→微分→加速度
(2)姿态→微分→角速度→微分→角加速度
- 上述量化描述:
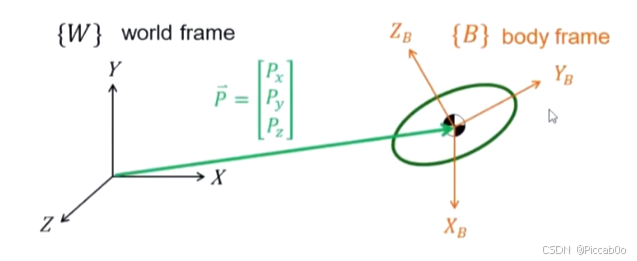
(1)位置:用向量P描述一个坐标系(相对于另一个坐标系)的位置
- 注意1:向量可以代表“空间中的一个点”,或者是“一个方向”。
- 注意2:这里角标的写法, A P B ^AP_B APB代表“从A坐标系看B坐标系”
(2)姿态:用旋转矩阵R描述一个坐标系(相对于另一个坐标系)的姿态
B A R = [ ∣ ∣ ∣ A X ^ B A Y ^ B A Z ^ B ∣ ∣ ∣ ] = [ X ^ B ⋅ X ^ A Y ^ B ⋅ X ^ A Z ^ B ⋅ X ^ A X ^ B ⋅ Y ^ A Y ^ B ⋅ Y ^ A Z ^ B ⋅ Y ^ A X ^ B ⋅ Z ^ A Y ^ B ⋅ Z ^ A Z ^ B ⋅ Z ^ A ] _B^AR= \begin{bmatrix} | & & | & & | \\ ^A\hat{X}_B & & ^A\hat{Y}_B & & ^A\hat{Z}_B \\ | & & | & & | \end{bmatrix}=\begin{bmatrix} \hat{X}_B\cdot\hat{X}_A & \hat{Y}_B\cdot\hat{X}_A & \hat{Z}_B\cdot\hat{X}_A \\ \hat{X}_B\cdot\hat{Y}_A & \hat{Y}_B\cdot\hat{Y}_A & \hat{Z}_B\cdot\hat{Y}_A \\ \hat{X}_B\cdot\hat{Z}_A & \hat{Y}_B\cdot\hat{Z}_A & \hat{Z}_B\cdot\hat{Z}_A \end{bmatrix} BAR=
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 572
572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









