【机器人学】-位姿描述和齐次变换
最新推荐文章于 2025-09-29 16:10:55 发布





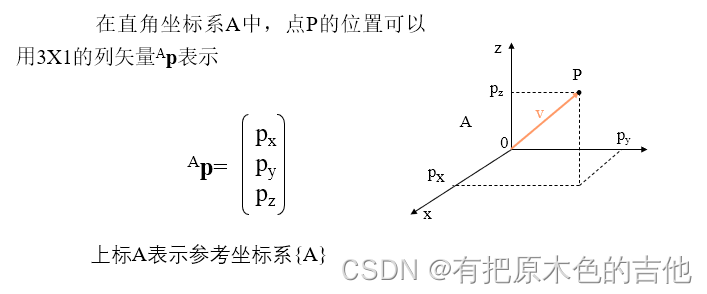
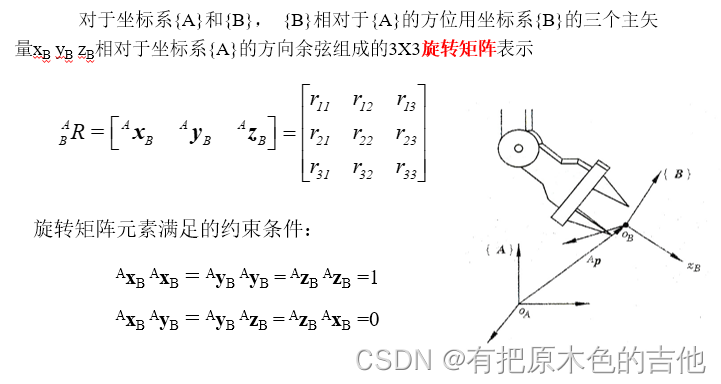
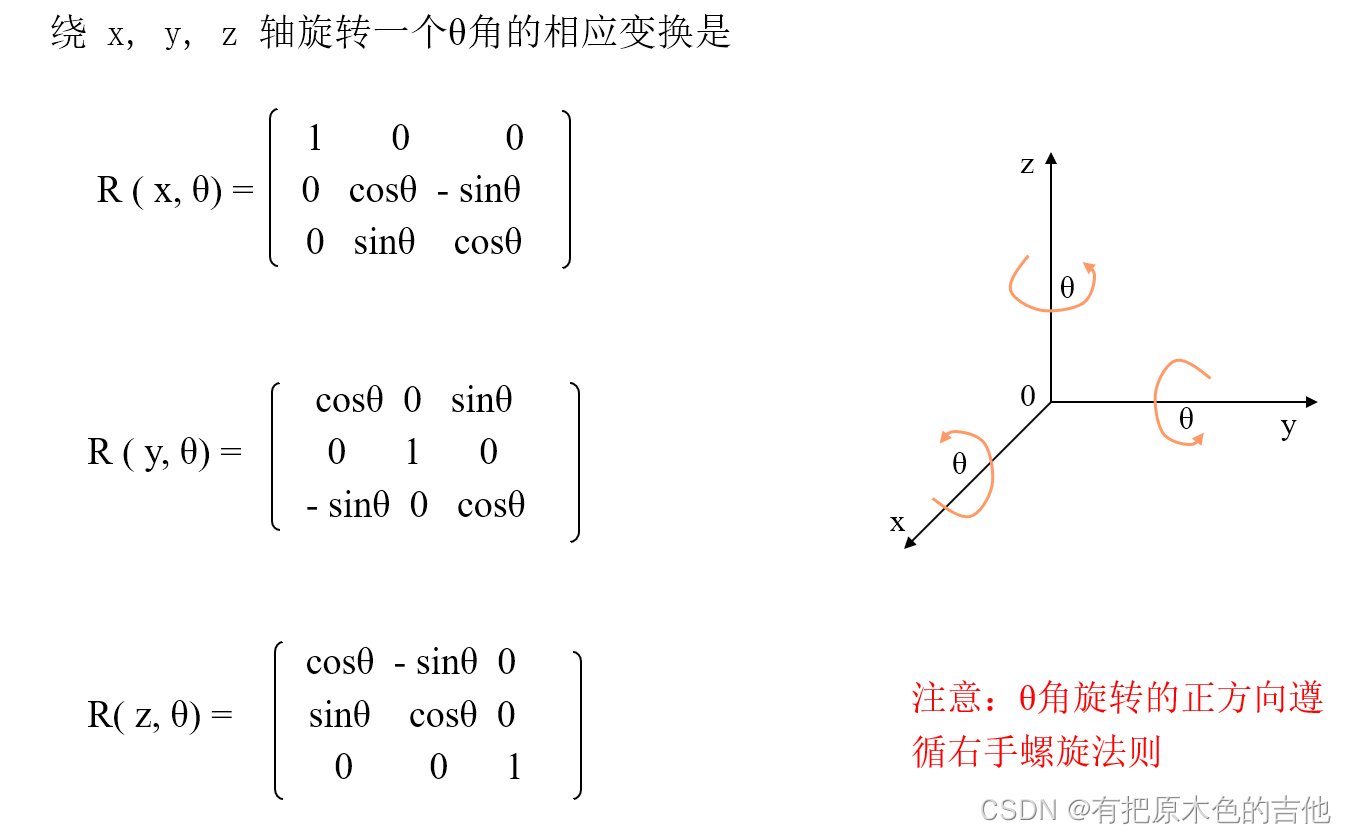
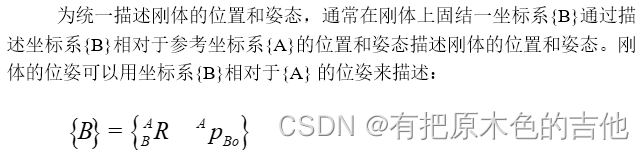
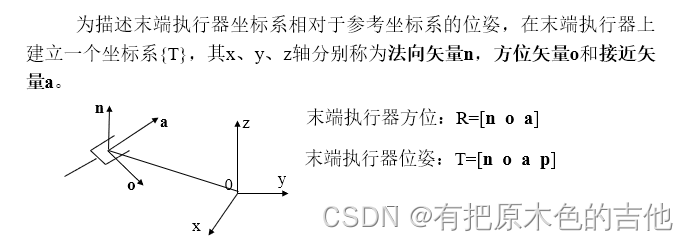
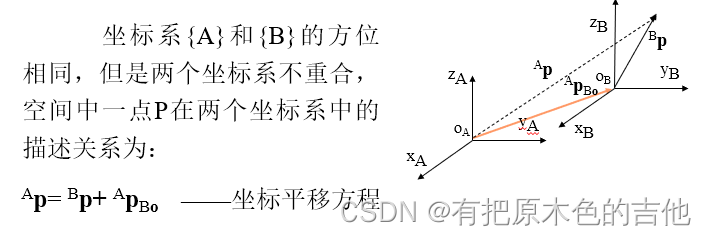
 该文详细介绍了机器人学中刚体位姿的描述方法,包括点的位置、方位姿态、刚体的位置与姿态等。重点讲解了齐次坐标和齐次变换,阐述了坐标平移、旋转变换以及一般变换的概念,并通过实例解析了坐标变换过程。同时,探讨了齐次变换矩阵的运算,包括矩阵相乘和求逆,强调了变换矩阵在描述物体运动和坐标系关系中的作用。
该文详细介绍了机器人学中刚体位姿的描述方法,包括点的位置、方位姿态、刚体的位置与姿态等。重点讲解了齐次坐标和齐次变换,阐述了坐标平移、旋转变换以及一般变换的概念,并通过实例解析了坐标变换过程。同时,探讨了齐次变换矩阵的运算,包括矩阵相乘和求逆,强调了变换矩阵在描述物体运动和坐标系关系中的作用。
该文详细介绍了机器人学中刚体位姿的描述方法,包括点的位置、方位姿态、刚体的位置与姿态等。重点讲解了齐次坐标和齐次变换,阐述了坐标平移、旋转变换以及一般变换的概念,并通过实例解析了坐标变换过程。同时,探讨了齐次变换矩阵的运算,包括矩阵相乘和求逆,强调了变换矩阵在描述物体运动和坐标系关系中的作用。
该文详细介绍了机器人学中刚体位姿的描述方法,包括点的位置、方位姿态、刚体的位置与姿态等。重点讲解了齐次坐标和齐次变换,阐述了坐标平移、旋转变换以及一般变换的概念,并通过实例解析了坐标变换过程。同时,探讨了齐次变换矩阵的运算,包括矩阵相乘和求逆,强调了变换矩阵在描述物体运动和坐标系关系中的作用。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1992
1992





