







目录
References:
nIsaac-gym(1): 安装及官方demo内容_hongliyu_lvliyu的博客-优快云博客_isaac安装
NVIDIA Isaac Gym安装与使用 - BLMontgomery - 博客园
https://github.com/NVIDIA-Omniverse/IsaacGymEnvs
1.安装
1.1 下载
Isaac Gym - Preview Release | NVIDIA Developer
点击join now
然后注册登录下载
然后等待下载完成即可
然后可以浏览器打开index.html进行安装
 1.2 安装
1.2 安装
解压后要把issacgym放在主目录下
cd isaacgym/python/
sh ../create_conda_env_rlgpu.sh
.2 初步运行
2.1 demo1
然后安装好之后,启动即可
source activate rlgpu
然后
![]()
出现报错

返回python子目录下,执行
pip install -e .然后再次执行
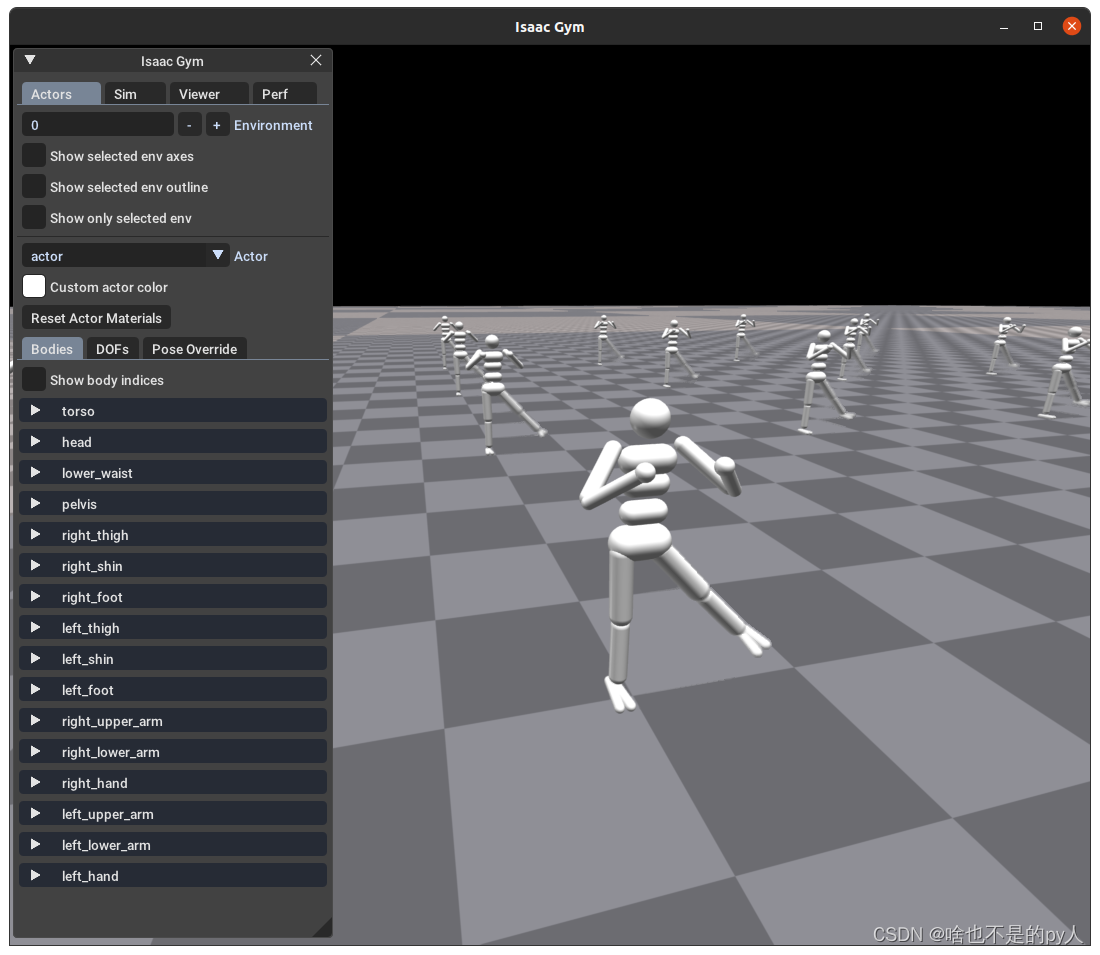
cd example/
python joint_monkey.py出现新的报错
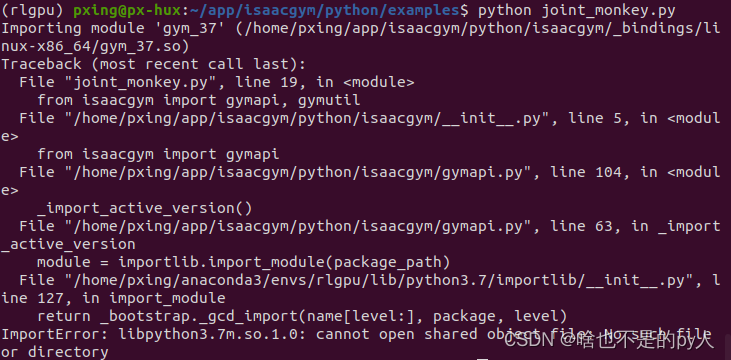 原因是因为python运行时没有加载到libpython3.7m.so.1.0 这个库文件, 将其复制到相应目录就可解决问题。
原因是因为python运行时没有加载到libpython3.7m.so.1.0 这个库文件, 将其复制到相应目录就可解决问题。
solutions:
找到conda环境下的这个文件
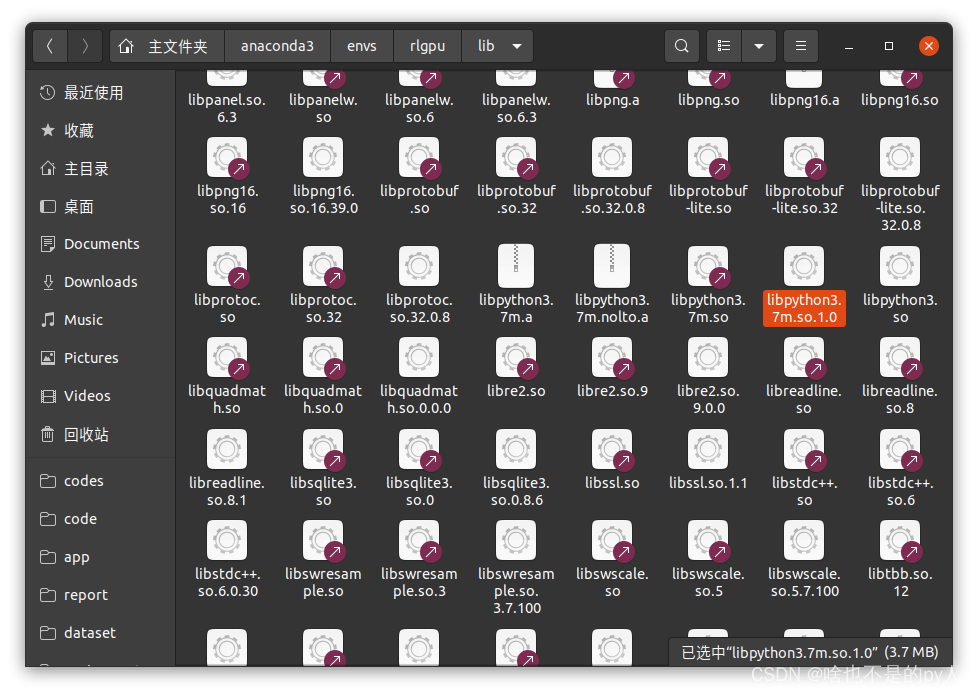 然后找到这个目录
然后找到这个目录
/usr/local/lib
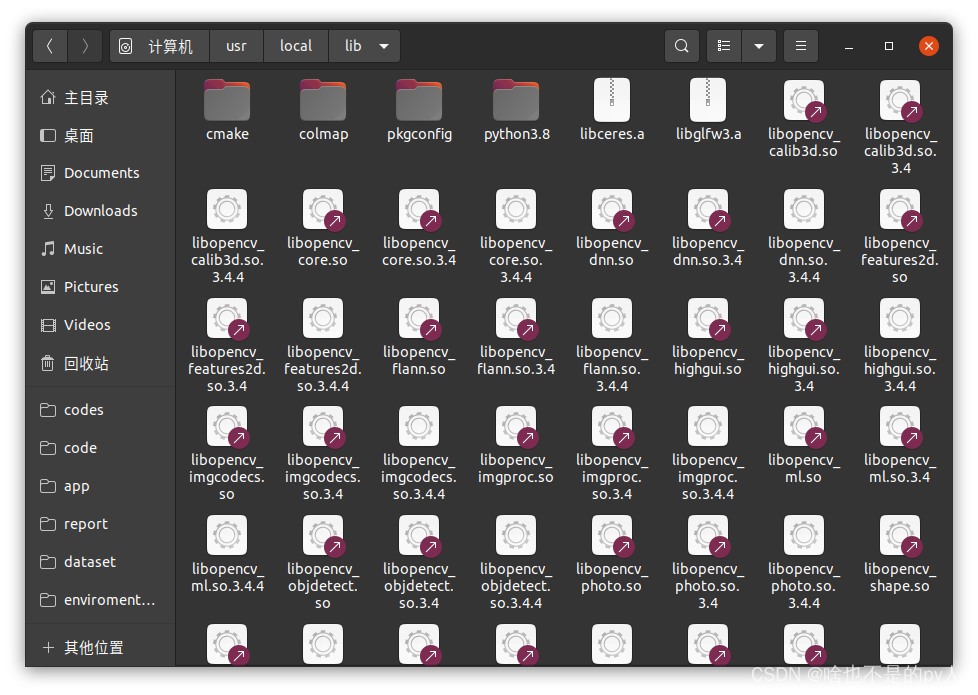 复制过去即可
复制过去即可
或者直接用以下命令:
sudo cp libpython3.7m.so.1.0 /usr/local/lib/
sudo cp libpython3.7m.so.1.0 /usr/lib/
sudo cp libpython3.7m.so.1.0 /usr/lib64/ 然后再运行
然后再运行
运行成功
.3 官方demo
3.1 下载及安装
https://github.com/NVIDIA-Omniverse/IsaacGymEnvs
先把这个repo给pull下来
pull下来以后
cd 到对应目录下
激活环境
source activate rlgpu
执行下述命令
pip install -e .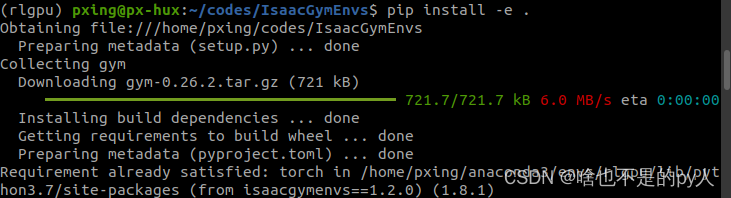
安装完之后启动demo
3.2 demo启动
cd 到对应目录下

然后启动
python train.py task=Cartpole
即可
另一个例子
python train.py task=Ant用 v 键关闭查看器来提高运行速度
esc是退出训练
3.3 加载训练好的模型
python train.py task=Ant checkpoint=runs/Ant/nn/Ant.pth test=True num_envs=643.4 其他demo
其他的demo在nvidia自带的demo
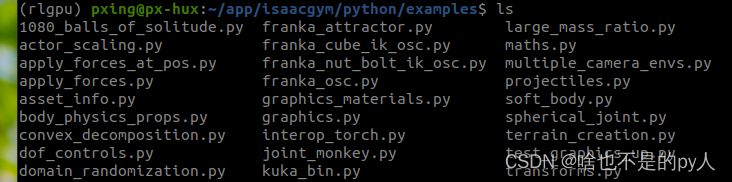 直接python运行即可
直接python运行即可

其他
其他见


















 1693
1693

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









