






一、介绍
MediaPipe是⼀款由Google开发并开源的数据流处理机器学习应⽤开发框架。它是⼀个基于图的数据处理管线,⽤于构建使⽤了多种形式的数据源,如视频、⾳频、传感器数据以及任何时间序列数据。
MediaPipe是跨平台的,可以运⾏在嵌⼊式平台(树莓派等),移动设备(iOS和Android),⼯作站和服务器上,并⽀持移动端GPU加速。 MediaPipe为实时和流媒体提供跨平台、可定制的ML解决⽅案。
MediaPipe 的核⼼框架由 C++ 实现,并提供 Java 以及 Objective C 等语⾔的⽀持。MediaPipe 的主要概念包括数据包(Packet)、数据流(Stream)、计算单元(Calculator)、图(Graph)以及⼦图(Subgraph)。
MediaPipe的特点:
- 端到端加速:内置的快速ML推理和处理即使在普通硬件上也能加速。
- ⼀次构建,随时随地部署:统⼀解决⽅案适⽤于Android、iOS、桌⾯/云、web和物联⽹。
- 即⽤解决⽅案:展⽰框架全部功能的尖端ML解决⽅案。
- 免费开源:Apache2.0下的框架和解决⽅案,完全可扩展和定制。
二、实验源码
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
pTime = cTime = volPer = value = index = 0
effect = ["color", "thresh", "blur", "hue", "enhance"]
volBar = 400
class handDetector:
def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):
self.tipIds = [4, 8, 12, 16, 20]
self.mpHand = mp.solutions.hands
self.mpDraw = mp.solutions.drawing_utils
self.hands = self.mpHand.Hands(
static_image_mode=mode,
max_num_hands=maxHands,
min_detection_confidence=detectorCon,
min_tracking_confidence=trackCon
)
self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=15)
self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=10, circle_radius=10)
def get_dist(self, point1, point2):
x1, y1 = point1
x2, y2 = point2
return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))
def calc_angle(self, pt1, pt2, pt3):
point1 = self.lmList[pt1][1], self.lmList[pt1][2]
point2 = self.lmList[pt2][1], self.lmList[pt2][2]
point3 = self.lmList[pt3][1], self.lmList[pt3][2]
a = self.get_dist(point1, point2)
b = self.get_dist(point2, point3)
c = self.get_dist(point1, point3)
try:
radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))
angle = radian / math.pi * 180
except:
angle = 0
return abs(angle)
def findHands(self, frame, draw=True):
img = np.zeros(frame.shape, np.uint8)
img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)
self.results = self.hands.process(img_RGB)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw: self.mpDraw.draw_landmarks(img, handLms, self.mpHand.HAND_CONNECTIONS)
return img
def findPosition(self, frame, draw=True):
self.lmList = []
if self.results.multi_hand_landmarks:
for id, lm in enumerate(self.results.multi_hand_landmarks[0].landmark):
# print(id,lm)
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
# print(id, lm.x, lm.y, lm.z)
self.lmList.append([id, cx, cy])
if draw: cv.circle(frame, (cx, cy), 15, (0, 0, 255), cv.FILLED)
return self.lmList
def frame_combine(slef,frame, src):
if len(frame.shape) == 3:
frameH, frameW = frame.shape[:2]
srcH, srcW = src.shape[:2]
dst = np.zeros((max(frameH, srcH), frameW + srcW, 3), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
else:
src = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
frameH, frameW = frame.shape[:2]
imgH, imgW = src.shape[:2]
dst = np.zeros((frameH, frameW + imgW), np.uint8)
dst[:, :frameW] = frame[:, :]
dst[:, frameW:] = src[:, :]
return dst
if __name__ == '__main__':
capture = cv.VideoCapture(0)
capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G'))
capture.set(cv.CAP_PROP_FRAME_WIDTH, 640)
capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480)
print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS))
hand_detector = handDetector()
while capture.isOpened():
ret, frame = capture.read()
action = cv.waitKey(1) & 0xFF
# frame = cv.flip(frame, 1)
img = hand_detector.findHands(frame)
lmList = hand_detector.findPosition(frame, draw=False)
if len(lmList) != 0:
angle = hand_detector.calc_angle(4, 0, 8)
x1, y1 = lmList[4][1], lmList[4][2]
x2, y2 = lmList[8][1], lmList[8][2]
cx, cy = (x1 + x2) // 2, (y1 + y2) // 2
cv.circle(img, (x1, y1), 15, (255, 0, 255), cv.FILLED)
cv.circle(img, (x2, y2), 15, (255, 0, 255), cv.FILLED)
cv.line(img, (x1, y1), (x2, y2), (255, 0, 255), 3)
cv.circle(img, (cx, cy), 15, (255, 0, 255), cv.FILLED)
if angle <= 10: cv.circle(img, (cx, cy), 15, (0, 255, 0), cv.FILLED)
volBar = np.interp(angle, [0, 70], [400, 150])
volPer = np.interp(angle, [0, 70], [0, 100])
value = np.interp(angle, [0, 70], [0, 255])
# print("angle: {},value: {}".format(angle, value))
# 杩涜闃堝€间簩鍊煎寲鎿嶄綔锛屽ぇ浜庨槇鍊紇alue鐨勶紝浣跨敤255琛ㄧず锛屽皬浜庨槇鍊紇alue鐨勶紝浣跨敤0琛ㄧず
if effect[index]=="thresh":
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)
frame = cv.threshold(gray, value, 255, cv.THRESH_BINARY)[1]
# 杩涜楂樻柉婊ゆ尝,(21, 21)琛ㄧず楂樻柉鐭╅樀鐨勯暱涓庡閮芥槸21锛屾爣鍑嗗樊鍙杤alue
elif effect[index]=="blur":
frame = cv.GaussianBlur(frame, (21, 21), np.interp(value, [0, 255], [0, 11]))
# 鑹插僵绌洪棿鐨勮浆鍖?HSV杞崲涓築GR
elif effect[index]=="hue":
frame = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
frame[:, :, 0] += int(value)
frame = cv.cvtColor(frame, cv.COLOR_HSV2BGR)
# 璋冭妭瀵规瘮搴? elif effect[index]=="enhance":
enh_val = value / 40
clahe = cv.createCLAHE(clipLimit=enh_val, tileGridSize=(8, 8))
lab = cv.cvtColor(frame, cv.COLOR_BGR2LAB)
lab[:, :, 0] = clahe.apply(lab[:, :, 0])
frame = cv.cvtColor(lab, cv.COLOR_LAB2BGR)
if action == ord('q'): break
if action == ord('f'):
index += 1
if index >= len(effect): index = 0
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
text = "FPS : " + str(int(fps))
cv.rectangle(img, (50, 150), (85, 400), (255, 0, 0), 3)
cv.rectangle(img, (50, int(volBar)), (85, 400), (0, 255, 0), cv.FILLED)
cv.putText(img, f'{int(volPer)}%', (40, 450), cv.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0), 3)
cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
dst = hand_detector.frame_combine(frame, img)
cv.imshow('dst', dst)
# cv.imshow('frame', frame)
# cv.imshow('img', img)
capture.release()
cv.destroyAllWindows()
三、实验现象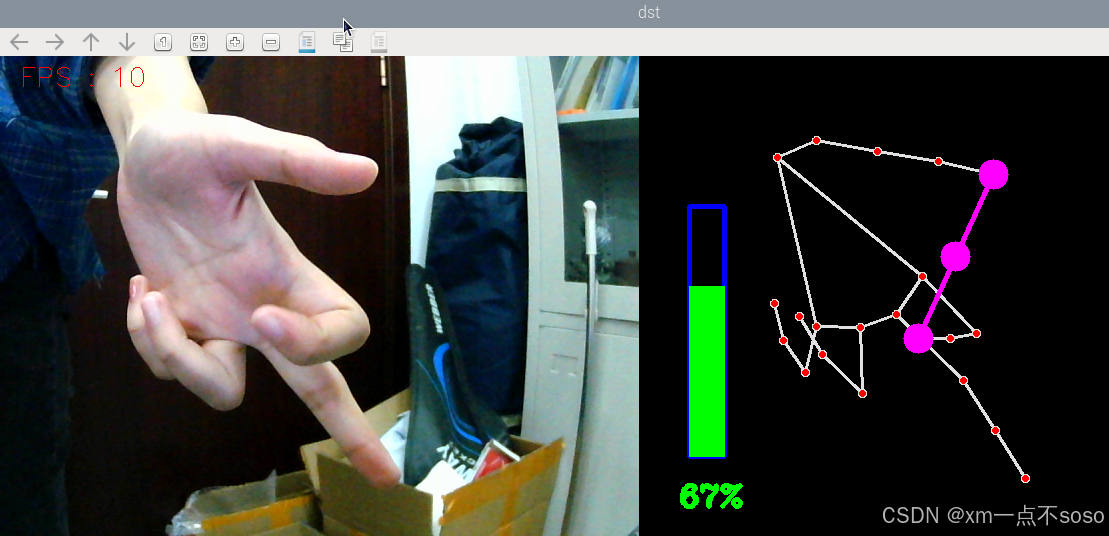
点击【F键】切换识别效果,通过拇指与食指的距离(张/合),可以控制图像的效果。
若想要退出程序运行,可以在预览窗口按q或者终端按Ctrl+C终止程序!

















 626
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









