






一、介绍
MediaPipe是⼀款由Google开发并开源的数据流处理机器学习应⽤开发框架。它是⼀个基于图的数据处理管线,⽤于构建使⽤了多种形式的数据源,如视频、⾳频、传感器数据以及任何时间序列数据。MediaPipe是跨平台的,可以运⾏在嵌⼊式平台(树莓派等),移动设备(iOS和Android),⼯作站和服务器上,并⽀持移动端GPU加速。 MediaPipe为实时和流媒体提供跨平台、可定制的ML解决⽅案。
MediaPipe 的核⼼框架由 C++ 实现,并提供 Java 以及 Objective C 等语⾔的⽀持。MediaPipe 的主要概念包括数据包(Packet)、数据流(Stream)、计算单元(Calculator)、图(Graph)以及⼦图(Subgraph)。
MediaPipe的特点:
- 端到端加速:内置的快速ML推理和处理即使在普通硬件上也能加速。
- ⼀次构建,随时随地部署:统⼀解决⽅案适⽤于Android、iOS、桌⾯/云、web和物联⽹。
- 即⽤解决⽅案:展⽰框架全部功能的尖端ML解决⽅案。
- 免费开源:Apache2.0下的框架和解决⽅案,完全可扩展和定制。
二、实验源码
#!/usr/bin/env python3
# encoding: utf-8
import math
import time
import cv2 as cv
import numpy as np
import mediapipe as mp
xp = yp = pTime = boxx = 0
tipIds = [4, 8, 12, 16, 20]
imgCanvas = np.zeros((480, 640, 3), np.uint8)
brushThickness = 5
eraserThickness = 100
top_height = 50
Color = "Red"
ColorList = {
'Red': (0, 0, 255),
'Green': (0, 255, 0),
'Blue': (255, 0, 0),
'Yellow': (0, 255, 255),
'Black': (0, 0, 0),
}
class handDetector:
def __init__(self, mode=False, maxHands=2, detectorCon=0.5, trackCon=0.5):
self.tipIds = [4, 8, 12, 16, 20]
self.mpHand = mp.solutions.hands
self.mpDraw = mp.solutions.drawing_utils
self.hands = self.mpHand.Hands(
static_image_mode=mode,
max_num_hands=maxHands,
min_detection_confidence=detectorCon,
min_tracking_confidence=trackCon )
self.lmDrawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 0, 255), thickness=-1, circle_radius=15)
self.drawSpec = mp.solutions.drawing_utils.DrawingSpec(color=(0, 255, 0), thickness=10, circle_radius=10)
def findHands(self, frame, draw=True):
self.lmList = []
img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)
self.results = self.hands.process(img_RGB)
if self.results.multi_hand_landmarks:
for handLms in self.results.multi_hand_landmarks:
if draw: self.mpDraw.draw_landmarks(frame, handLms, self.mpHand.HAND_CONNECTIONS, self.lmDrawSpec, self.drawSpec)
else: self.mpDraw.draw_landmarks(frame, handLms, self.mpHand.HAND_CONNECTIONS)
for id, lm in enumerate(self.results.multi_hand_landmarks[0].landmark):
h, w, c = frame.shape
cx, cy = int(lm.x * w), int(lm.y * h)
# print(id, cx, cy)
self.lmList.append([id, cx, cy])
return frame, self.lmList
def fingersUp(self):
fingers=[]
# Thumb
if (self.calc_angle(self.tipIds[0],
self.tipIds[0] - 1,
self.tipIds[0] - 2) > 150.0) and (
self.calc_angle(
self.tipIds[0] - 1,
self.tipIds[0] - 2,
self.tipIds[0] - 3) > 150.0): fingers.append(1)
else:
fingers.append(0)
# 4 finger
for id in range(1, 5):
if self.lmList[self.tipIds[id]][2] < self.lmList[self.tipIds[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
return fingers
def get_dist(self, point1, point2):
x1, y1 = point1
x2, y2 = point2
return abs(math.sqrt(math.pow(abs(y1 - y2), 2) + math.pow(abs(x1 - x2), 2)))
def calc_angle(self, pt1, pt2, pt3):
point1 = self.lmList[pt1][1], self.lmList[pt1][2]
point2 = self.lmList[pt2][1], self.lmList[pt2][2]
point3 = self.lmList[pt3][1], self.lmList[pt3][2]
a = self.get_dist(point1, point2)
b = self.get_dist(point2, point3)
c = self.get_dist(point1, point3)
try:
radian = math.acos((math.pow(a, 2) + math.pow(b, 2) - math.pow(c, 2)) / (2 * a * b))
angle = radian / math.pi * 180
except:
angle = 0
return abs(angle)
if __name__ == '__main__':
capture = cv.VideoCapture(0)
capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G'))
capture.set(cv.CAP_PROP_FRAME_WIDTH, 640)
capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480)
print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS))
hand_detector = handDetector(detectorCon=0.85)
while capture.isOpened():
ret, frame = capture.read()
# frame = cv.flip(frame, 1)
h, w, c = frame.shape
frame,lmList = hand_detector.findHands(frame, draw=False)
if len(lmList) != 0:
# print(lmList)
# tip of index and middle fingers
x1, y1 = lmList[8][1:]
x2, y2 = lmList[12][1:]
fingers = hand_detector.fingersUp()
if fingers[1] and fingers[2]:
# print("Seclection mode")
if y1 < top_height:
if 0 < x1 < int(w / 5) - 1:
boxx = 0
Color = "Red"
if int(w / 5) < x1 < int(w * 2 / 5) - 1:
boxx = int(w / 5)
Color = "Green"
elif int(w * 2 / 5) < x1 < int(w * 3 / 5) - 1:
boxx = int(w * 2 / 5)
Color = "Blue"
elif int(w * 3 / 5) < x1 < int(w * 4 / 5) - 1:
boxx = int(w * 3 / 5)
Color = "Yellow"
elif int(w * 4 / 5) < x1 < w - 1:
boxx = int(w * 4 / 5)
Color = "Black"
cv.rectangle(frame, (x1, y1 - 25), (x2, y2 + 25), ColorList[Color], cv.FILLED)
cv.rectangle(frame, (boxx, 0), (boxx + int(w / 5), top_height), ColorList[Color], cv.FILLED)
cv.rectangle(frame, (0, 0), (int(w / 5) - 1, top_height), ColorList['Red'], 3)
cv.rectangle(frame, (int(w / 5) + 2, 0), (int(w * 2 / 5) - 1, top_height), ColorList['Green'], 3)
cv.rectangle(frame, (int(w * 2 / 5) + 2, 0), (int(w * 3 / 5) - 1, top_height), ColorList['Blue'], 3)
cv.rectangle(frame, (int(w * 3 / 5) + 2, 0), (int(w * 4 / 5) - 1, top_height), ColorList['Yellow'], 3)
cv.rectangle(frame, (int(w * 4 / 5) + 2, 0), (w - 1, top_height), ColorList['Black'], 3)
if fingers[1] and fingers[2] == False and math.hypot(x2 - x1, y2 - y1) > 50:
# print("Drawing mode")
if xp == yp == 0: xp, yp = x1, y1
if Color == 'Black':
cv.line(frame, (xp, yp), (x1, y1), ColorList[Color], eraserThickness)
cv.line(imgCanvas, (xp, yp), (x1, y1), ColorList[Color], eraserThickness)
else:
cv.line(frame, (xp, yp), (x1, y1), ColorList[Color], brushThickness)
cv.line(imgCanvas, (xp, yp), (x1, y1), ColorList[Color], brushThickness)
cv.circle(frame, (x1, y1), 15, ColorList[Color], cv.FILLED)
xp, yp = x1, y1
else: xp = yp = 0
imgGray = cv.cvtColor(imgCanvas, cv.COLOR_BGR2GRAY)
_, imgInv = cv.threshold(imgGray, 50, 255, cv.THRESH_BINARY_INV)
imgInv = cv.cvtColor(imgInv, cv.COLOR_GRAY2BGR)
frame = cv.bitwise_and(frame, imgInv)
frame = cv.bitwise_or(frame, imgCanvas)
if cv.waitKey(1) & 0xFF == ord('q'): break
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
text = "FPS : " + str(int(fps))
cv.rectangle(frame, (20, h - 100), (50, h - 70), ColorList[Color], cv.FILLED)
cv.putText(frame, Color, (70, h - 75), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
cv.putText(frame, text, (20, h-30), cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 1)
cv.imshow('frame', frame)
capture.release()
cv.destroyAllWindows()
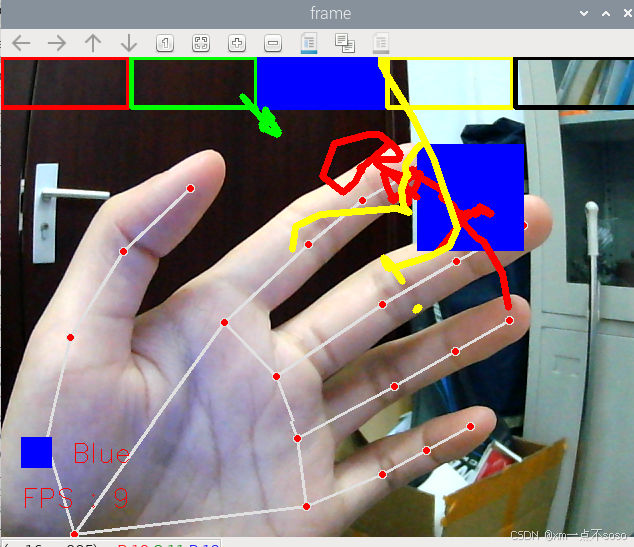
三、实验现象
右⼿⾷指和中指合并时是选择状态,同时弹出颜⾊选框,两指尖移动到对应颜⾊位置时,选中该颜⾊(⿊⾊为橡⽪擦);⾷指和中指分开始是绘画状态,可在画板上任意绘制。
若想要退出程序运行,可以在预览窗口按q或者终端按Ctrl+C终止程序!

















 626
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









