







1、程序功能说明
小车启动,终端运行程序,rviz中会显示URDF模型。
2、进入小车docker
打开终端输入以下指令进入docker:
./docker_ros2.sh
出现以下界面就是进入docker成功,现在即可通过指令控制小车,

3、程序启动
加载URDF和生成一个模拟控制器并且启动rviz,终端输入,
ros2 launch yahboomcar_description display_launch.py
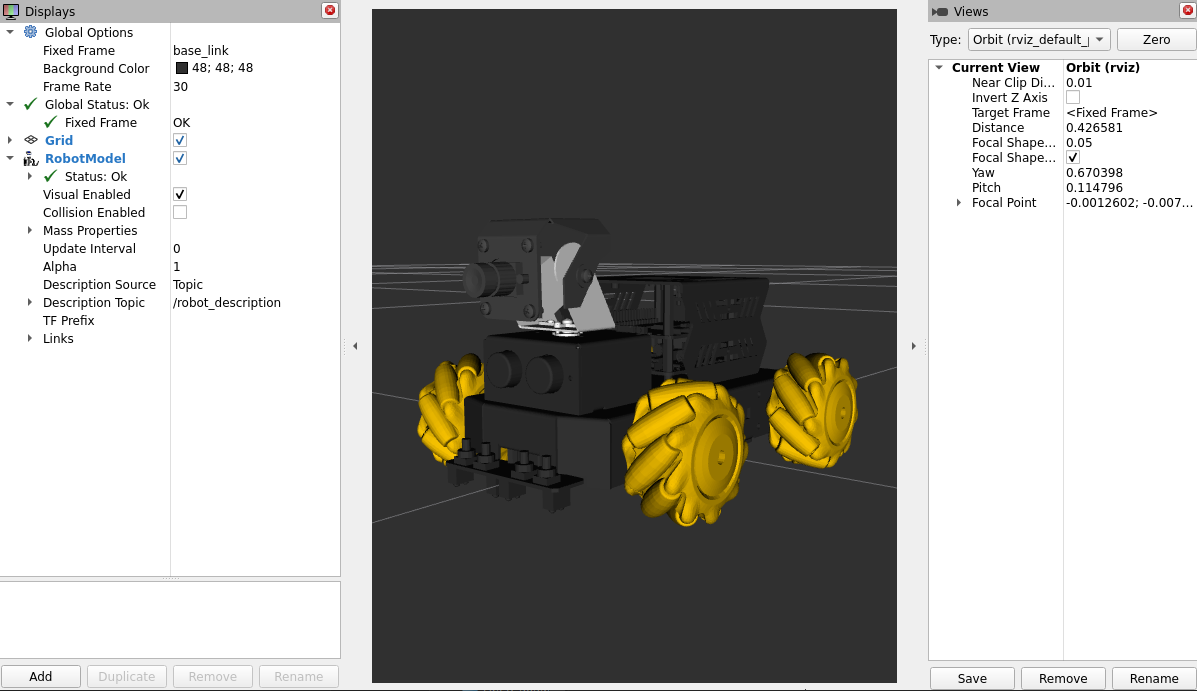
然后,用鼠标调整视角,滑动刚才生成的模拟控制器,即可看的小车的轮胎/相机在变化,
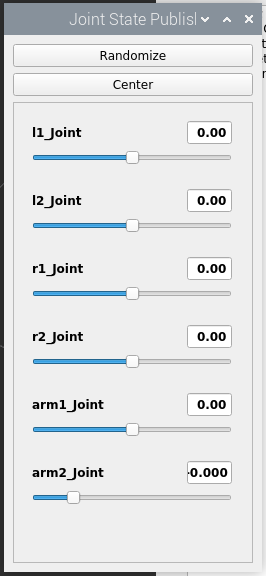
- l1_Joint:控制左前轮
- l2_Joint:控制左后轮
- r1_Joint:控制右前轮
- r2_Joint:控制右后轮
- arm1_Joint:控制云台1
- arm2_Joint:控制云台2
- Randomize:随机发布数值到各个joint
- Center:所有的Joint归中
4、源程序代码
from ament_index_python.packages import get_package_share_path
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import Command, LaunchConfiguration
from launch_ros.actions import Node
from launch_ros.parameter_descriptions import ParameterValue
def generate_launch_description():
urdf_tutorial_path = get_package_share_path('yahboomcar_description')
d 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2259
2259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









