







1、写自启脚本,我以start.sh为例,创建脚本如下
#! /bin/bash
source /opt/ros/kinetic/setup.bash
source /home/cx/rplidar/devel/setup.bash
roslaunch rplidar_ros rplidar.launch
2、查看脚本文件是否有可执行权限
cd到可执行文件目录下,输入ls查看
颜色,如果为白色就为它添加可执行权限:
sudo chmod +x start.sh
颜色变绿即可
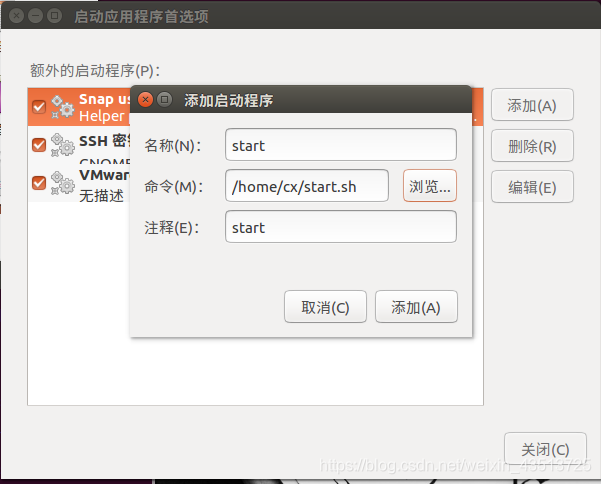
3、输入
$gnome-session-properties
点击添加,设置如下
4、重启测试
$reboot

















 5424
5424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









