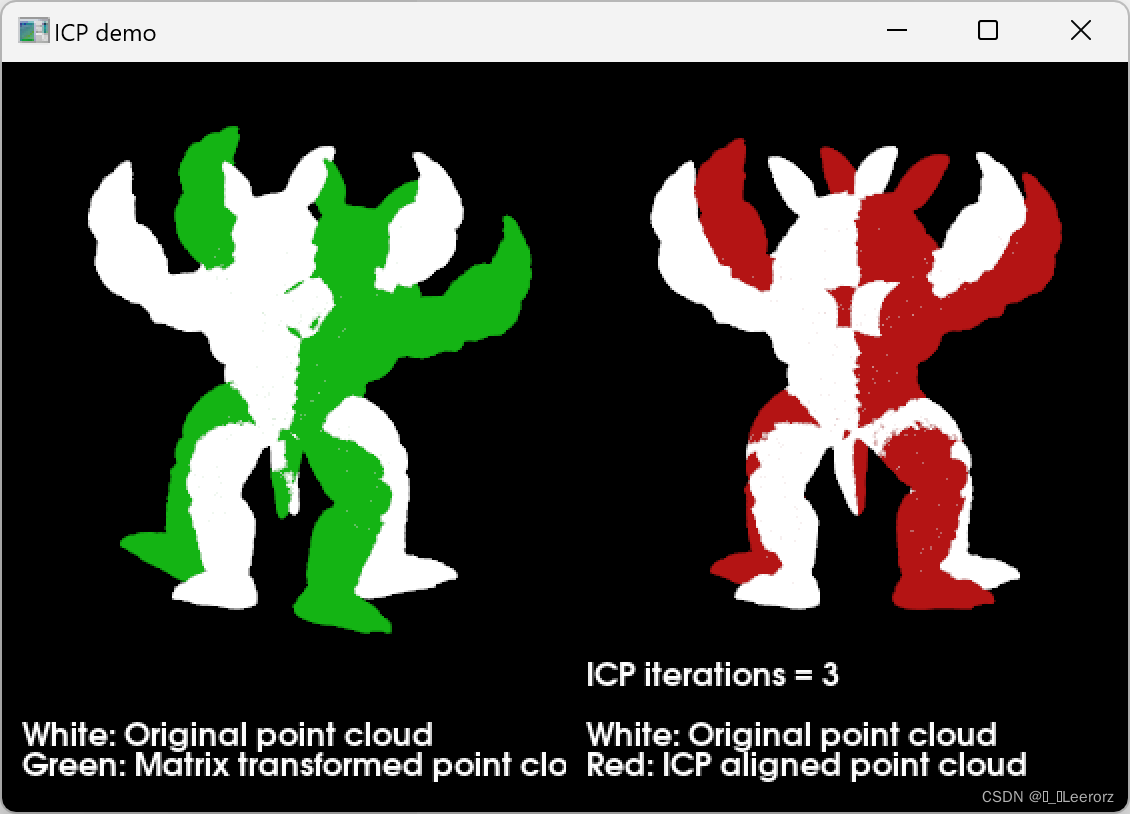
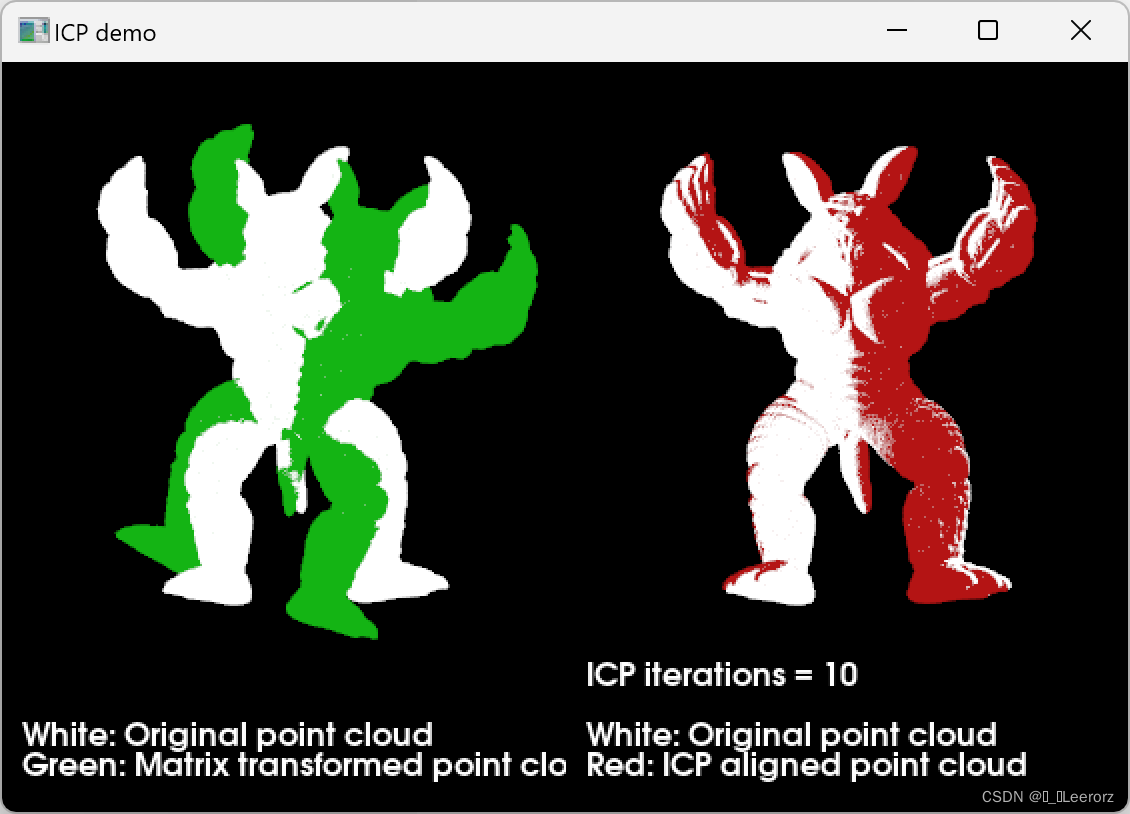
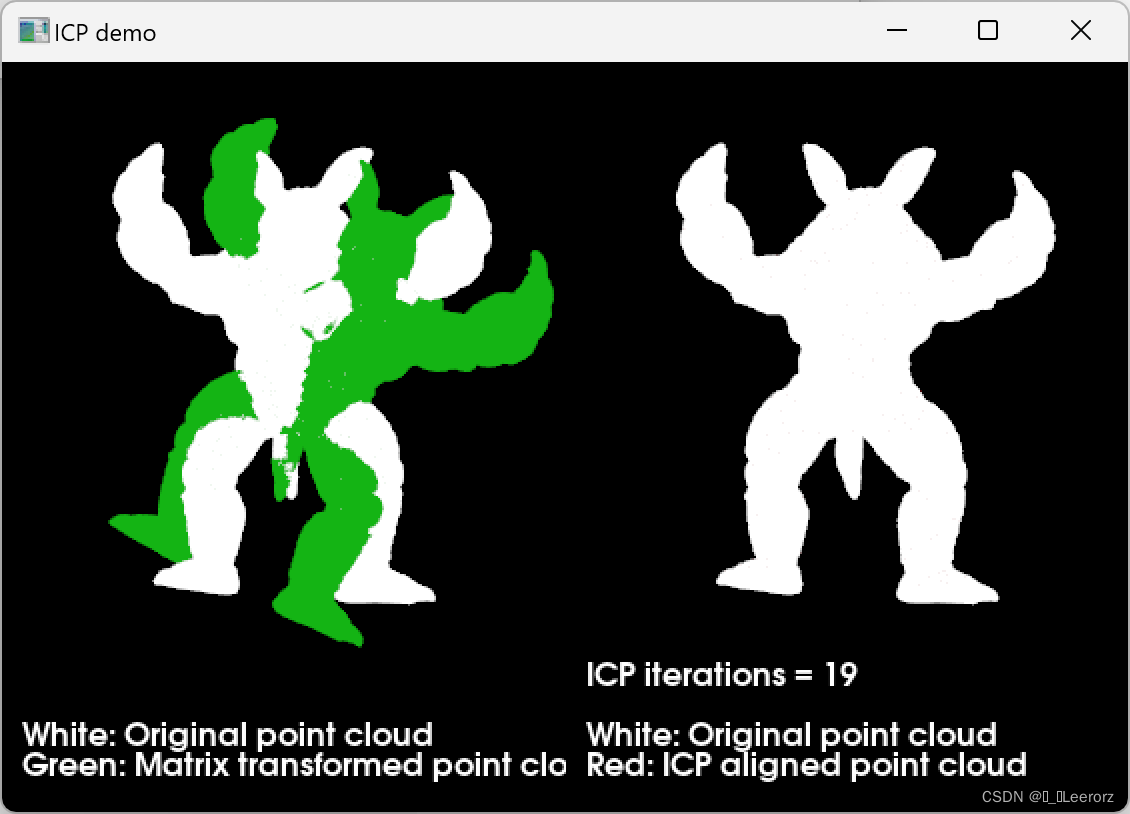
PCL最近点迭代ICP算法实现点云配准 1. 效果图 1.1 icp迭代至3次时 1.2 icp迭代至10次时 1.3 icp迭代至19次时 2. ICP基础知识 2.1 配准?配准的目的? 2.1 配准方法? 3. 使用PCL实现点云配准 1. 效果图 1.1 icp迭代至3次时 1.2 icp迭代至10次时 1.3 icp迭代至19次时 从上图中可以看出,迭代至19次时,配准已经完成 2. ICP基础知识 2.1 配准?配准的目的? 将从不同的点云视图一致地对齐到同一个模型中的过程,可以称为点云配准。配准的目标是在不同的视图中获得相关联的位置点和方向,相关联的位置点和方向是相对于同一个坐标系而言的,也就是说需要在不同坐标

 424
237
424
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 本文介绍了使用PCL库进行点云配准的ICP算法,通过迭代次数的变化展示了配准效果,从3次迭代到19次,最终实现精确的配准。详细探讨了配准的目的和方法,特别是ICP算法如何通过最小化点云间的欧氏距离误差找到最佳刚性变换矩阵。
本文介绍了使用PCL库进行点云配准的ICP算法,通过迭代次数的变化展示了配准效果,从3次迭代到19次,最终实现精确的配准。详细探讨了配准的目的和方法,特别是ICP算法如何通过最小化点云间的欧氏距离误差找到最佳刚性变换矩阵。

 订阅专栏 解锁全文
订阅专栏 解锁全文

























