







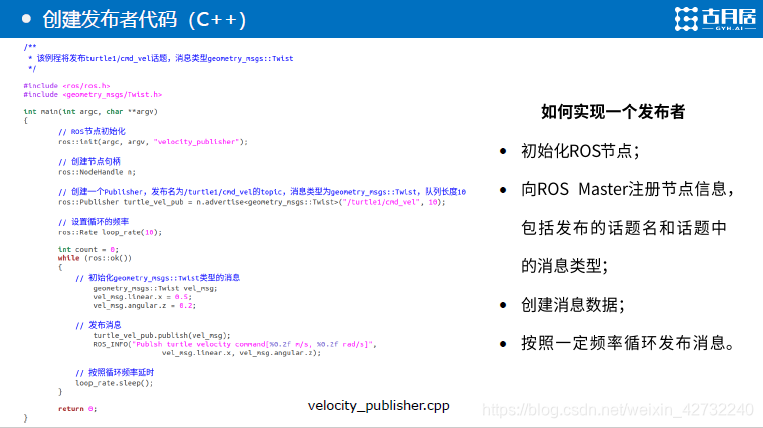
 这篇博客介绍了如何在ROS中创建一个发布者节点。首先,通过catkin_create_pkg命令创建了一个名为learning_topic的功能包,依赖于roscpp、std_msgs和geometry_msgs库。接着,将源代码velocity_publisher.cpp添加到功能包中,并配置编译脚本以链接catkin_LIBRARIES。完成编译后,使用source命令设置环境变量,确保代码正确运行。
这篇博客介绍了如何在ROS中创建一个发布者节点。首先,通过catkin_create_pkg命令创建了一个名为learning_topic的功能包,依赖于roscpp、std_msgs和geometry_msgs库。接着,将源代码velocity_publisher.cpp添加到功能包中,并配置编译脚本以链接catkin_LIBRARIES。完成编译后,使用source命令设置环境变量,确保代码正确运行。
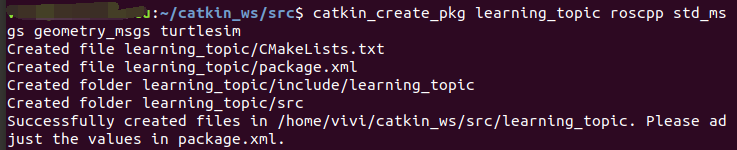
1、功能包放到工作空间的src里面
catkin_create_pkg learning_topic roscpp std_msgs geometry_msgs turtlesim
2、编译:在以下文件下添加如下两句
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
1、功能包放到工作空间的src里面
catkin_create_pkg learning_topic roscpp std_msgs geometry_msgs turtlesim
2、编译:在以下文件下添加如下两句
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
 450
250
535
450
250
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























