







 本文是ROS入门的教程,通过启动ROS Master、运行小海龟仿真器和控制节点,介绍如何操作小海龟。使用命令行工具rosnode、rostopic、rosservice进行节点、话题和服务的管理,并通过rosbag进行话题记录和复现。教程涵盖了从基本操作到进阶技巧的内容。
本文是ROS入门的教程,通过启动ROS Master、运行小海龟仿真器和控制节点,介绍如何操作小海龟。使用命令行工具rosnode、rostopic、rosservice进行节点、话题和服务的管理,并通过rosbag进行话题记录和复现。教程涵盖了从基本操作到进阶技巧的内容。
1、启动ROS Master :roscore
启动小海龟仿真器:rosrun turtlesim turtlesim_node
启动海龟控制节点:rosrun turtlesim turtle_teleop_key
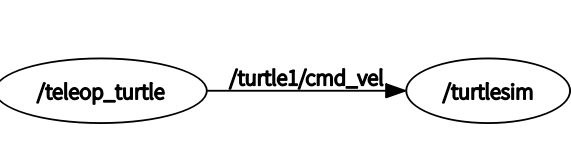
2、显示系统计算图,全貌:rqt_graph
3、没有界面的命令行工具:
①节点相关:rosnode
节点:rosnode list
查看具体节点:rosnode info:如rosnode /turtlesim
②关于topic相关:rostopic
话题列表:rostopic list
给话题发布数据并让海龟运动,rostopic pub 话题名 。如rostopic pub /turtle1/cmd_vel geometry_msgs/Twist
(默认:米、弧度)rostopi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









