







 本文详细介绍了如何在ROS环境中搭建工作空间,包括创建、编译和安装过程,以及如何使用catkin工具创建功能包,并设置了必要的环境变量。
本文详细介绍了如何在ROS环境中搭建工作空间,包括创建、编译和安装过程,以及如何使用catkin工具创建功能包,并设置了必要的环境变量。
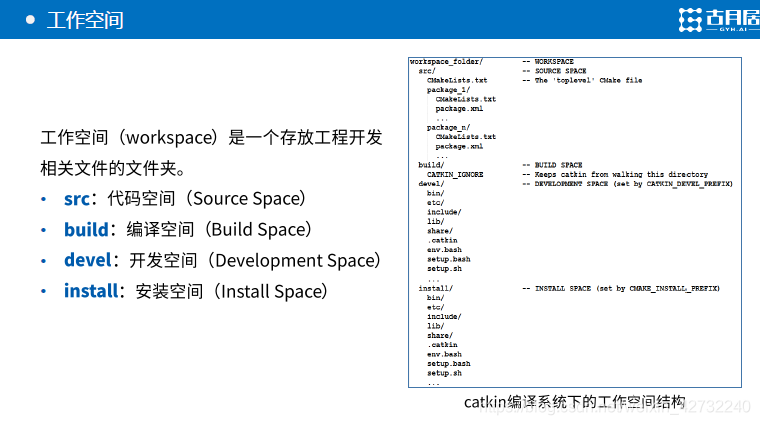
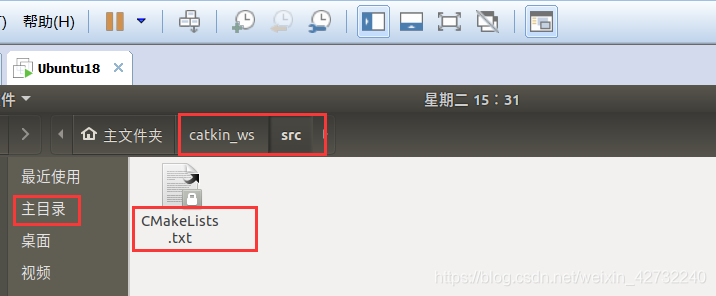
1、创建工作空间:mkdir -p ~/catkin_ws/src (catkin_ws可以随便取名字)
cd ~/catkin_ws/src
catkin_init_workspace
2、在根目录下编译,根目录如下,编译指令:catkin_make

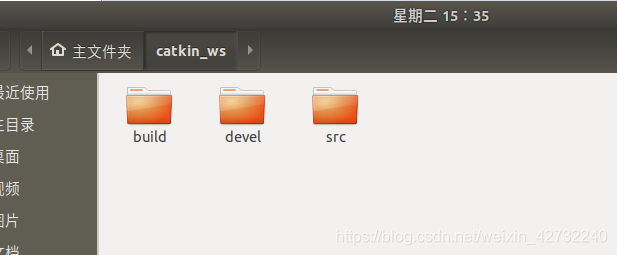
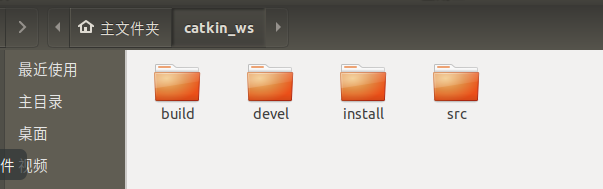
但是此时没有install安装空间,因此添加命令: catkin_make install
3、创建功能包:catkin_create_pkg test_pkg std_msgs rospy roscpp(在src文件夹下)

①可以在src文件夹下编译catkin_make;
②设置环境变量:source devel/setup.bash
![]()
③检查环境变量:echo $ROS_PACKAGE_PATH
![]()


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









