







刚开始录制的数据时没有考虑相机和IMU之间的坐标变换,但是后来发现跟踪效果不好,去查验imu数据时,发现,我采集保存的imu数据格式没有和euroc数据集中的imu数据保存格式统一,所以需要研究的是在euroc用于数据采集的设备中的相机和imu之间的坐标系变换关系,我的设备相机和imu之间的坐标系变换关系,然后按照euroc数据保存格式来保存我采集的数据。
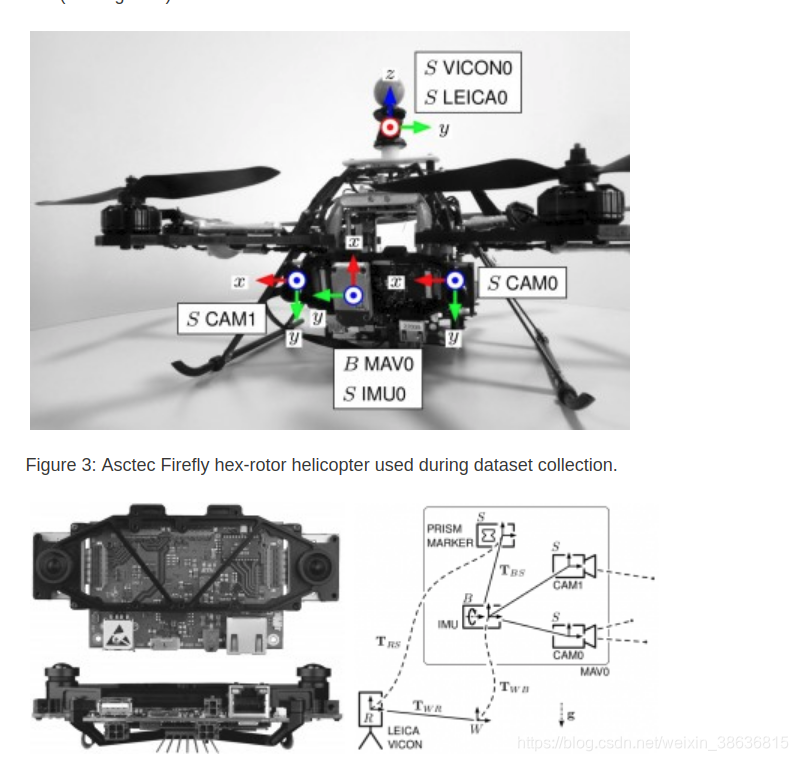
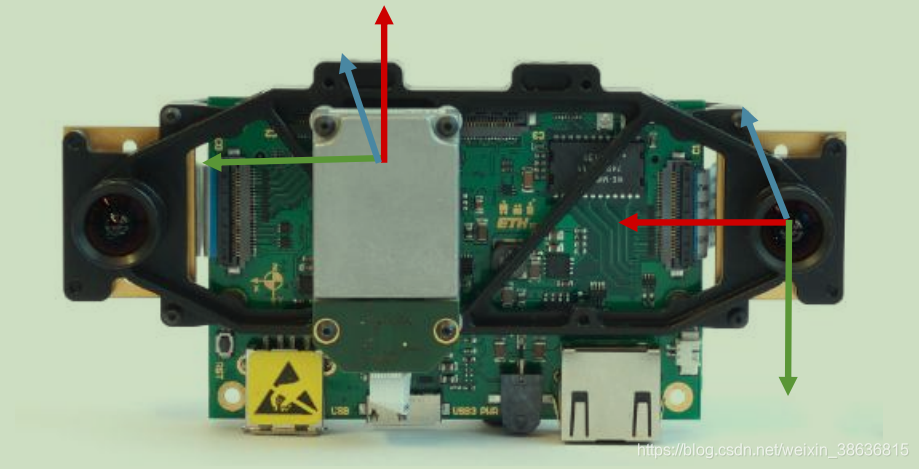
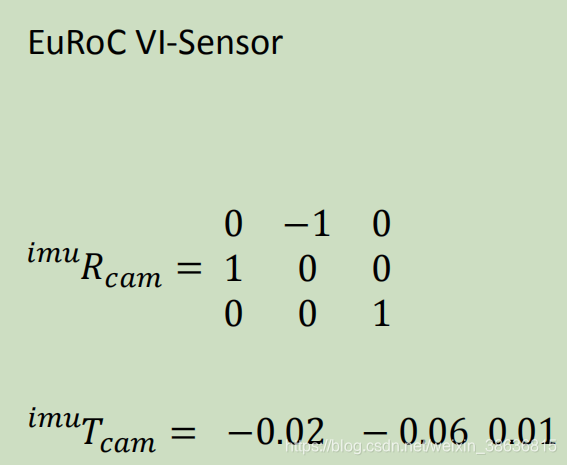
下面是euroc数据集使用的数据采集设备,使用的是左手坐标系,相机朝向与z轴朝向相反,相机与imu之间的位姿变换是,顺时针旋转90度,
Euroc数据集的采集工具所有的设备中相机和imu之间的坐标变换。满足右手坐标系,从相机到imu的旋转是,绕着在z轴(根据圆点的标志,z轴是垂直于屏幕朝外的)顺时针(以上帝的视角对着z轴的正方向看向xoy平面)旋转90度。
下面这个图标记错了。
下面是vins室内数据采集设备,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









